Anki Vector 2 0 · Volume 4
The Original Cloud and Voice Stack
4.1 A Robot in Two Halves
Vector was designed with intelligence split between what the robot could do on its own and what it needed the vendor’s network for. The onboard hardware — the Qualcomm Snapdragon APQ8009 running Yocto/embedded Linux — handled the physical world: animation, navigation, obstacle avoidance, and the continuous sensory loop from the camera, the time-of-flight scanner, the cliff sensors, the IMU, and the four-microphone beamforming array (wevolver; thedroidyouarelookingfor; Kinvert). The cloud handled the cognitive world: the moment the robot heard “Hey Vector,” it dispatched a recognition request outward, and the answer — whether a weather update, a timer, a unit conversion, or a trivia response — came back from Anki’s, and later Digital Dream Labs’, servers (Wikipedia; vector-cloud).
This division was not a compromise — it was a deliberate product architecture. Keeping language understanding and knowledge-graph lookups off the robot kept the cost and power budget within reach of a palm-sized consumer device while delivering answers that felt capable for the time. The consequence, invisible while the servers stayed online, was that the robot’s voice intelligence was a rented service, not a local capability. When the service ended, the voice path vanished with it. The body, the navigation, and the face remained intact.
4.2 The Onboard Half
The robot’s autonomy — everything it could do without a network connection — ran on the Snapdragon APQ8009. Navigation and obstacle avoidance used the front-facing camera and the infrared time-of-flight scanner continuously; the four cliff sensors prevented falls from desk edges; the six-axis IMU tracked orientation; the high-resolution IPS face rendered Vector’s expressive animations (wevolver; iFixit; Kinvert). The capacitive touch sensor on the top surface let the robot respond to pats and prods. Dock return, companion-cube tracking, and the full behavioural animation loop were all local. In normal use, a Vector that had lost its network connection could still wander, navigate, play, and respond to touch — it had simply lost its voice.
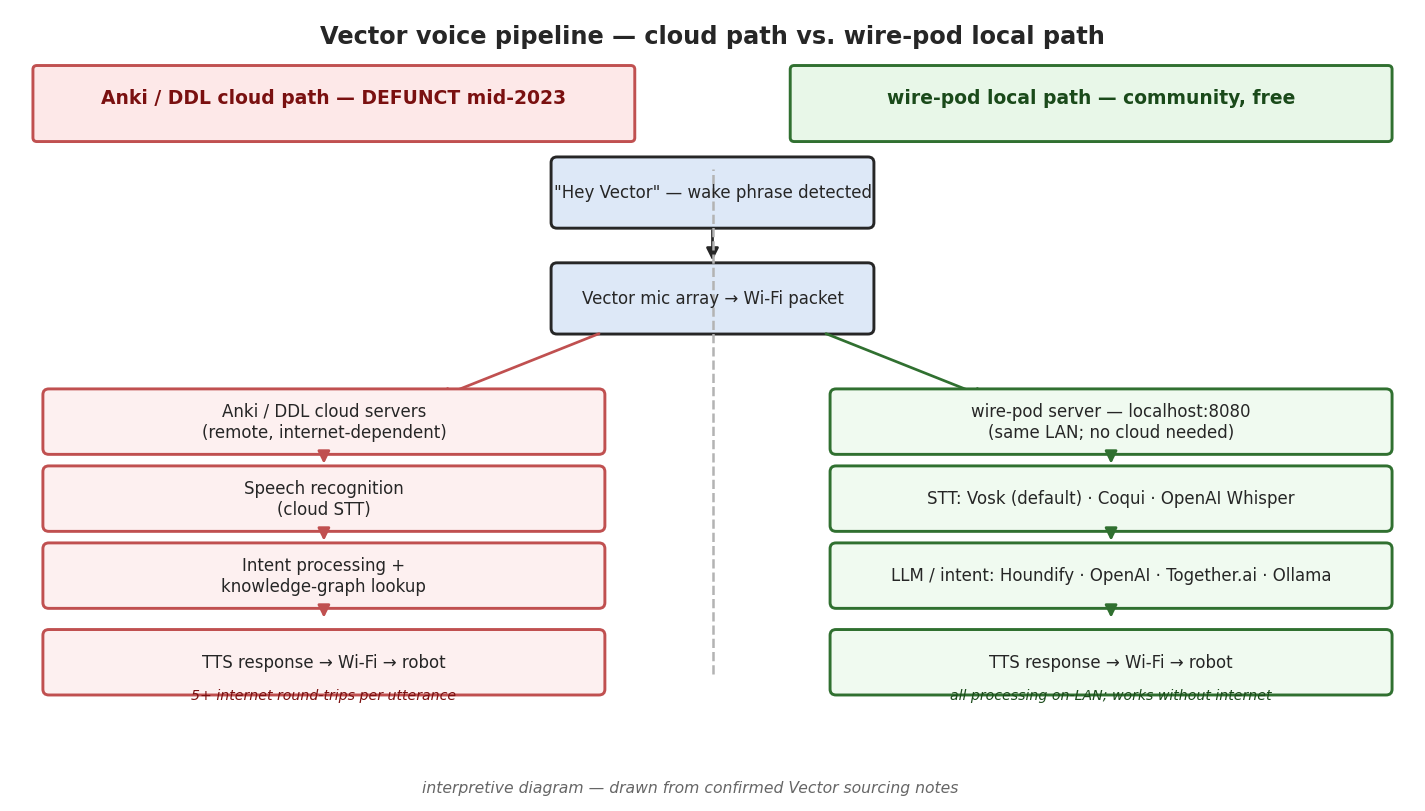
Wake-word detection itself ran on the robot. The four-microphone beamforming array listened continuously for “Hey Vector,” and only after the phrase was recognised locally did the robot open an outbound connection to the cloud (vector-cloud). Note: no reachable source states the exact wake-word algorithm or dedicated detection processor used; this on-robot detection stage is an architectural inference from the vector-cloud/chipper source structure — it is the boundary at which cloud traffic begins, and the boundary the community server must present itself at.
4.3 The Cloud Half
Once the wake phrase was detected, the voice path crossed the network. Speech recognition converted the spoken query to text; an intent-dispatch layer matched the result against a knowledge graph and a set of built-in intent handlers — weather, timers, arithmetic, general trivia, the current date and time; the answer was packaged and returned to the robot, which spoke it and animated a response (Wikipedia; vector-cloud). The servers responsible for this — sitting under Anki’s ownership until April 2019, then Digital Dream Labs’ from December 2019 — processed every “Hey Vector” that any robot anywhere heard (Wikipedia; Robot Report).
4.3.1 Alexa Integration
In addition to Anki’s own voice intelligence, Vector shipped with an Amazon Alexa integration that let the robot act as an Alexa voice endpoint (Wikipedia; vector-cloud). A user could direct an “ask Alexa” query through the robot to the Alexa cloud, expanding the intent space well beyond what Anki’s own knowledge graph covered. Like the rest of the voice path, this integration depended entirely on live cloud connectivity — both Anki/DDL’s servers and Amazon’s. No aspect of the Alexa integration survived to the local stack; it is one of the capabilities wire-pod does not replicate (see Vol 6 for the local voice alternatives that took its place).
4.4 The Open-Sourced Remains
When Digital Dream Labs inherited the Vector platform from Anki’s bankruptcy estate, the cloud stack came with it. Before the shutdown, DDL released two key components publicly, laying the groundwork for the community revival that followed.
4.4.1 vector-cloud: vic-cloud and vic-gateway
The repository github.com/digital-dream-labs/vector-cloud contains the compiled ARM
binaries for two processes: vic-cloud and vic-gateway (github.com/digital-dream-
labs/vector-cloud). These are the bridge services that ran on the robot’s side of the
cloud link — managing the authenticated connection outward to DDL’s servers. The last
release is v1.0.0, published January 18, 2021 (github.com/digital-dream-labs/vector-
cloud). The binaries are ARM-compiled and run on the robot’s Snapdragon; what they
connected to on the server side is the piece the community had to build a replacement
for.
4.4.2 chipper: the Voice Backend
The repository github.com/digital-dream-labs/chipper contains the server-side voice
backend — the component that the robot’s cloud connection reached out to
(github.com/digital-dream-labs/chipper). chipper exposes a gRPC/TLS interface with a
ProcessIntent endpoint: it receives audio or text from the robot, processes it, and
returns an intent and any associated response data. The repository carries an MIT
license, which is what made it possible for the community to base a replacement voice
layer directly on the same interface definitions rather than having to reverse-engineer
the protocol from scratch (github.com/digital-dream-labs/chipper).
4.4.3 What the Reference Implementation Did Not Include
The critical detail in chipper’s public release is what it does not contain: no built-in speech-to-text (STT) engine and no natural-language understanding (NLU) model (github.com/digital-dream-labs/chipper). DDL released the interface and the plumbing — the gRPC scaffolding, the endpoint definitions, the TLS certificate handling — but the actual speech recognition and the knowledge-graph query logic that made “Hey Vector” answer questions are absent from the public code. chipper as released is a reference implementation: a skeleton that accepts the right calls and returns the right shapes, but that requires an external STT backend and intent handler to do anything useful.
This gap is precisely why a community-built server was necessary. Pointing a Vector at a bare chipper instance would produce correctly formatted but empty responses. Vol 6 covers how wire-pod fills this gap — pairing chipper’s interface structure with Vosk, Coqui, or Whisper for speech recognition and a choice of knowledge graph or language model for intent handling.
4.5 What the Shutdown Killed
The DDL cloud went dark to the community around mid-2023 and was officially offline by January 2024 (wiki.thedroidyouarelookingfor.info; iFixit). The full account of that shutdown — the corporate failure, the subscription price increases, and the Pennsylvania AG lawsuit over roughly 14,000 unfilled prepaid orders (CBS Pittsburgh) — belongs to Vol 2. What matters here is what the shutdown destroyed technically.
The answer is narrow and precise: the voice path. Every other capability that Vector shipped with survived intact. Navigation, animation, touch response, the cliff-sensor loop, the face display, the camera — all of it ran on the onboard Snapdragon and continued to function exactly as before. The robot that could no longer answer “Hey Vector, what is the weather?” could still wander the desk, avoid the edge, recognise its owner’s face, play with the cube, and return to the charger. The body was fine. The voice was dead.
This architectural split — a capable local machine wearing a cloud-hosted voice as a replaceable layer — is exactly what made the community revival feasible. A robot whose entire intelligence had lived in the cloud would have been a paperweight. Vector was not: it was a fully functional robot that had lost one replaceable service. Vol 6 covers how wire-pod restores that service on a local machine, with no DDL dependency.
Sources
- github.com/digital-dream-labs/vector-cloud — the vic-cloud and vic-gateway ARM binaries; last release v1.0.0, January 18, 2021; the robot-side bridge services to the DDL cloud.
- github.com/digital-dream-labs/chipper — the gRPC/TLS voice backend;
ProcessIntentendpoint; MIT license; released as a reference implementation without STT or NLU. - Wikipedia, “Anki (American company)” and Vector material — cloud dependence, the Alexa integration, corporate timeline.
- Robot Report, “Anki assets acquired by Digital Dream Labs” and “Inside the Anki shutdown” — Anki bankruptcy, DDL acquisition (December 2019).
- wiki.thedroidyouarelookingfor.info — community technical wiki: cloud-shutdown timeline (mid-2023).
- iFixit, “Anki Vector” device page — cloud shutdown confirmed by January 2024.
- wevolver, “Vector 2.0 AI Robot Companion” — sensor suite; the four-microphone beamforming array, the ToF scanner, and the full onboard capability set.
- Kinvert, “What’s Inside Anki Vector” — teardown confirming the Snapdragon APQ8009 as the onboard compute platform.
- Full gated fact base with confirmed/unverified markers and source reachability:
02-inputs/vector_sourcing_notes.md.