Heathkit HERO 2000 (ET-19) · Volume 4
Drive & Mobility
4.1 How the HERO 2000 gets around
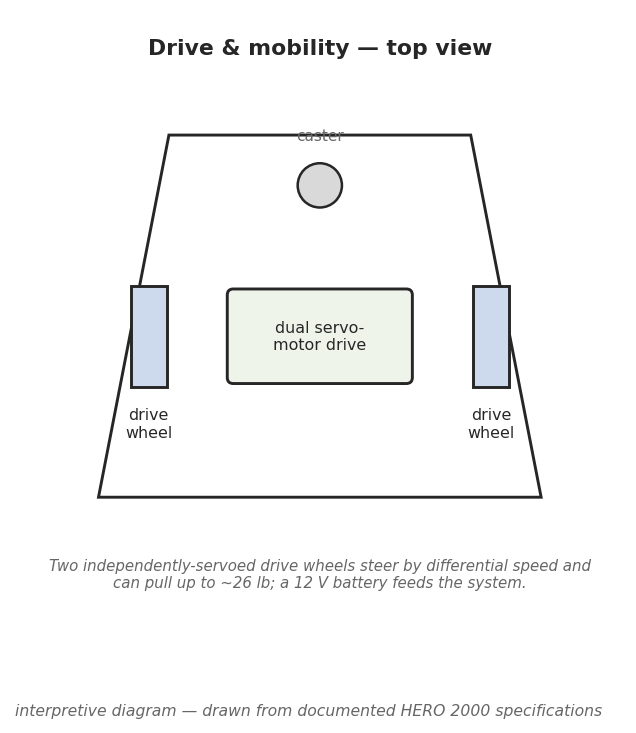
The HERO 2000 moves on a two-wheel dual servo-motor drive: two independently driven wheels, each turned by its own servo motor, with the robot steering not by swivelling a wheel but by running the two wheels at different speeds (theoldrobots.com). That single design choice — differential drive rather than a steered wheel — separates the HERO 2000’s locomotion from both of its Heathkit predecessors, and it is the right choice for a machine of its bulk. The HERO 2000 is a waist-high, roughly 78-pound robot (HERO 2000 spec sheet; see Vol. 1), and its base is rated to pull up to about 26 pounds (theoldrobots.com) — figures that place it in a different class from the 19-to-20-inch tabletop HERO 1 and HERO Jr.
The drive is not run directly by the main processor. In keeping with the machine’s multiprocessor design (Vol. 2), motion is delegated to a dedicated Intel 8042 UPI slave processor assigned to motor control (HERO 2000 spec sheet), so the Intel 8088 master issues high-level motion requests and the motor-control slave does the real-time work of driving the two servos. Power for all of this comes from the robot’s 12-volt battery (HERO 2000 spec sheet) — whose capacity is reported differently by different sources, a conflict flagged below and treated in full in Vol. 9.
4.2 Two wheels, two motors
The defining mechanical fact of the drive is its symmetry. Two wheels each carry their own servo motor, and the two motors are commanded independently (HERO 2000 spec sheet; theoldrobots.com). A servo motor — as distinct from the open-loop stepper motors that drove the HERO 1 — implies closed-loop position or velocity control, in which the motor’s actual motion is sensed and fed back so the controller can correct error. That feedback is what lets a heavy machine start, hold, and stop a commanded speed under varying load rather than simply stepping open-loop and hoping the load does not stall it. The record describes the drive as servo-motor based but does not spell out the feedback element (encoder, tachometer, or potentiometer), so the specific sensing method is left unclaimed here.
Because each wheel is driven on its own, the two wheels can turn at the same speed, at different speeds, or in opposite directions — and it is precisely that freedom that the HERO 2000 uses to steer.
4.3 Differential steering
The HERO 2000 steers by driving its two wheels at different speeds rather than by pointing a steerable wheel (theoldrobots.com). When both wheels turn at the same speed in the same direction the robot tracks straight; when one wheel runs faster than the other the robot curves toward the slower side; and when the wheels turn in opposite directions the robot pivots. This is the classic differential-drive (or “tank-style”) arrangement, and it is the cleanest way to give a large, heavy robot agility in tight indoor spaces.
The contrast with the earlier HERO robots is sharp and worth drawing out. The HERO 1
and HERO Jr both drove and turned through a single steerable wheel at one end of
the base — a head/drive wheel that was turned to a heading and then driven — while
the other wheels were passive (HERO 1 and HERO Jr dives; _shared/comparison.md). A
steered-wheel robot has a turning circle: it cannot rotate about its own center, and
its maneuvers sweep an arc. A differential-drive robot like the HERO 2000 has no such
constraint in principle — counter-rotating the wheels lets it spin essentially in
place — which is a meaningful advantage for a 32-inch machine that has to work in a
room rather than on a tabletop.
What the record does not give is the geometry that would let one compute the HERO 2000’s actual turning behavior: the wheel diameter, the track width (the spacing between the two driven wheels), and the commanded wheel speeds are not stated in the gated sources. The turning radius for any given speed pair is therefore left explicitly unclaimed — it cannot be derived without those numbers, and they are not in the documented record. A reader who needs them should consult the factory ET-19 Technical Manual, the authoritative primary for the drive’s mechanical dimensions.

4.4 Pulling its weight — the ~26 lb capacity
One of the few load figures the record does give is striking: the HERO 2000’s drive is rated to pull up to about 26 pounds (theoldrobots.com). For a robot whose own mass with the arm fitted is on the order of 78 pounds (HERO 2000 spec sheet), a 26-pound draw bar pull is a substantial fraction of its own weight, and it tells us something about the machine’s intent. This is not a delicate tabletop demonstrator; it is a floor-running robot built to move itself — and a useful load — across a room, with the motor torque and the chassis traction to back it.
That pulling figure should be read together with the machine’s size and weight from Vol. 1. A heavy, low, wide base does two things at once: it lowers the center of gravity so the tall torso and the extended arm do not tip the robot, and it loads the drive wheels enough to get traction for that 26-pound pull. The dual-servo drive, the heavy battery (below), and the broad base are all of a piece — a coherent mobility design for a large educational/automation robot rather than a scaled-up toy. The exact motor torque, gear ratio, and top speed are not stated in the gated sources and are left unclaimed; only the pulling capacity itself is documented.
4.5 The Colson drive wheel
On the wheels themselves, the most specific account comes from a firsthand source. In the restoration writeup at selectric.org, the HERO 2000’s drive wheel is identified as a Colson wheel — a make of industrial caster/wheel — and that detail is attributed here to that restoration account rather than to the factory spec sheet (selectric.org/hero2000). A Colson-type wheel is a solid or semi-pneumatic industrial wheel of the kind used on carts and material-handling equipment, which is consistent with a robot built to carry its own considerable weight and to pull a load: an industrial wheel gives durable rolling contact and predictable traction under the kind of static and dynamic loads the 78-pound machine imposes.
Because the Colson identification is a single restorer’s observation of a particular machine, it is presented as attributed firsthand detail, not as a factory specification. The wheel’s diameter and tread are not given in the gated record and are left unclaimed.
4.6 The motor-control UPI — the drive’s dedicated slave
The HERO 2000 does not run its motors from the main processor’s program loop. As laid out in Vol. 2, the machine is a multiprocessor: an Intel 8088 master delegates each major subsystem to its own Intel 8042 UPI (Universal Peripheral Interface) slave processor, and one of those slaves is dedicated to motor control (HERO 2000 spec sheet). The drive is that slave’s job.
The division of labor matters for how the drive behaves. The 8088 issues a high-level motion command — in effect, “drive forward,” “turn,” “stop” — and the motor-control 8042 takes responsibility for the moment-to-moment servo control: commanding the two motors, working the feedback loop, and keeping the wheels on their commanded speeds while the master gets on with running the user’s program, the sensors, and the rest. This is exactly what a real-time control task wants — a processor doing nothing but watching and correcting the motors — and it is the reason a multiprocessor architecture suits a mobile robot. On the passive backplane (Vol. 2, Vol. 3) the documented card set includes a Motor Controller card (selectric.org/hero2000), which is the physical home of this function.
It is worth noting one conflict in the record about the slave processors generally: while the spec sheet identifies the slaves as 8042 UPIs, one secondary source describes them instead as “Z-80” processors. That claim is not supported by the spec sheet and is treated in full in Vol. 2; this volume gates the motor-control slave to the 8042 UPI of the spec sheet and notes the Z-80 description only as the contradicted reading.
4.7 Power to the drive — the 12 V battery
The drive — and the rest of the robot — runs from an onboard 12-volt battery (HERO 2000 spec sheet). Here the record carries a conflict that should be stated plainly rather than resolved by picking a side:
- The HERO 2000 spec sheet (
hero.dsavage.net) gives the battery as 12 V, 14 Ah, supporting roughly 4 to 6 hours of active operation. - theoldrobots.com describes a 24 Ah battery and a much longer endurance — “up to six days.”
The most plausible reconciliation is that the two figures describe different things: 4–6 hours of active running versus standby endurance measured in days. But the underlying 14 Ah versus 24 Ah capacity figures genuinely differ between the sources, and this volume flags both rather than asserting one. A larger battery would of course matter to the drive specifically — pulling a 26-pound load draws current, and run-time under load depends directly on capacity — so the discrepancy is not academic. The full power story, including the 120 VAC charger and the docking charger with angled rails described in the selectric.org restoration, is the subject of Vol. 9; this volume notes only that the drive’s energy comes from that 12 V battery and that its capacity is reported in conflict.
4.8 What the record does not say
The HERO 2000’s drive is, by the standard of this hub, only partially documented, and the gaps are worth stating explicitly so they are not silently filled. The gated sources establish the kind of drive (two-wheel, dual servo-motor, differential steering), one load figure (the ~26 lb pull), one wheel identification (the Colson wheel, attributed to selectric.org), the controlling processor (the motor-control 8042 UPI), and the power source (the 12 V battery). They do not establish:
- Wheel diameter or tread dimensions.
- Drive speed — the robot’s top or cruising speed is not stated.
- Gear ratio or motor torque between the servo motors and the wheels.
- Track width and therefore the turn geometry — the turning radius for a given speed pair cannot be computed without it, and is left unclaimed.
- The feedback element in the servo loop (encoder, tachometer, or potentiometer).
None of these is invented here. The factory ET-19 Technical Manual is the authoritative primary a restorer or interfacer should consult for the drive’s exact mechanical and electrical numbers; the gated public record supports the qualitative picture above but not those specifics.
4.9 In short
The HERO 2000 moves on a two-wheel dual servo-motor drive and steers by differential wheel speed (theoldrobots.com) — a clean break from the single steerable wheel of the HERO 1 and HERO Jr, and the better choice for a heavy, room-running machine that can pivot in place. Its base is rated to pull about 26 pounds (theoldrobots.com), consistent with its ~78-pound size (HERO 2000 spec sheet, Vol. 1); its drive wheel is identified as a Colson industrial wheel in the selectric.org restoration writeup; its motors are run by a dedicated motor-control 8042 UPI slave (HERO 2000 spec sheet, Vol. 2); and the whole thing is fed by a 12 V battery whose capacity the sources report in conflict (14 Ah per the spec sheet, 24 Ah per theoldrobots — Vol. 9). The numbers that would pin down the robot’s actual speed and turning behavior — wheel diameter, speed, gear ratio, and track width — are not in the documented record and are left explicitly unclaimed.
Comments (0)