Heathkit HERO 2000 (ET-19) · Volume 6
The Optional Arm
6.1 What the arm is
The HERO 2000 could be ordered, or upgraded, with a multi-jointed manipulator arm
ending in a gripper — an option rather than a fixed part of the machine. When fitted,
the arm extends from the robot’s torso and gives the otherwise mobile-but-handless base
the ability to reach, grasp, and place light objects. The factory spec sheet rates the
arm to a payload of about 1 pound (hero.dsavage.net HERO 2000 spec sheet;
theoldrobots.com). It is the same general idea as the optional 5-axis arm on the HERO 1
(Vol. 1; _shared/comparison.md), but it is a heavier, more capable mechanism on a far
larger robot, and — crucially for the HERO 2000’s design — fitting it changes the
robot’s electronics, not just its mechanics.
This volume covers what the record documents about the arm: its payload, the joint ranges given on the spec sheet, the extra processor and controller card the arm brings with it, and the firsthand restoration detail on how the arm is actually driven (cables and pulleys) from the Selectric writeup. Where the record is silent — total axis count, reach, gripper force, joint speeds — this volume says so rather than guessing.
6.2 The documented joints
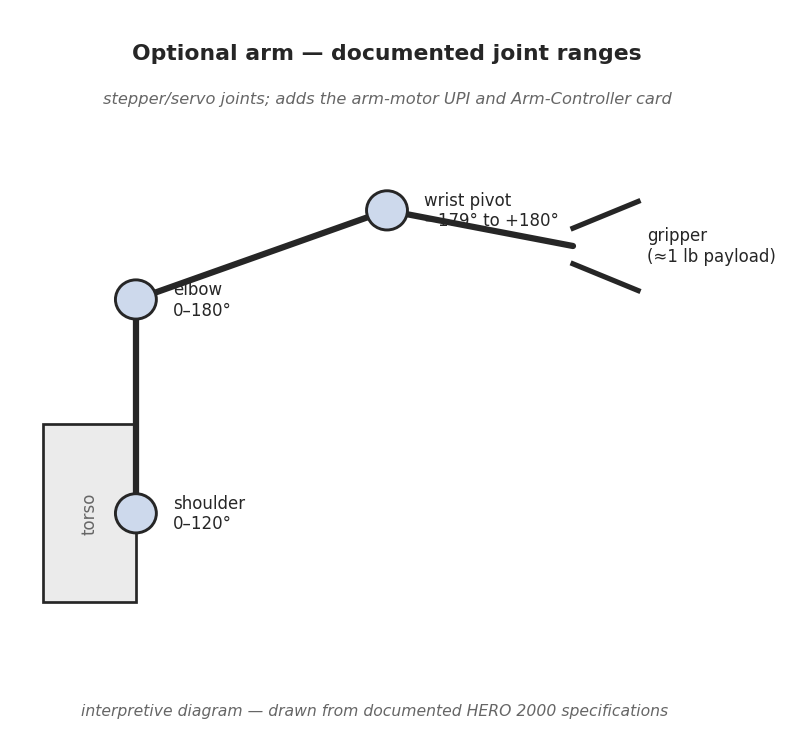
The single most specific thing the record gives about the arm is a set of joint angle
ranges, transcribed on the HERO 2000 spec sheet (hero.dsavage.net):
Table 1 — ranges, transcribed on the HERO 2000 spec sheet (hero.dsavage.net)
| Joint | Documented range | Source |
|---|---|---|
| Shoulder / arm | 0° to 120° | HERO 2000 spec sheet |
| Elbow | 0° to 180° | HERO 2000 spec sheet |
| Wrist pivot | −179° to +180° | HERO 2000 spec sheet |
These three figures are the load-bearing facts of this volume, and they should be read exactly as what they are: the angular travel of three named joints. The shoulder/arm joint raises and lowers the upper arm through a quarter-turn-plus (120°). The elbow opens and closes through a full half-circle (180°). The wrist pivots through very nearly a complete revolution (−179° to +180°, i.e. essentially the full 360° of rotation about the wrist axis).
What the spec sheet does not state — and what this volume therefore does not claim — is the arm’s total number of axes, its reach or extended length, the opening span or clamping force of the gripper, or the speed at which any joint moves. The three documented joints plus a gripper imply at least those degrees of freedom, but the record gives no figure for a total axis count, and none is asserted here. A reader who needs the complete kinematic specification should consult the factory ET-19 Technical Manual, the authoritative primary for the arm’s full geometry; the manual is not confirmed to be freely downloadable, so the numbers above are gated to the transcribed spec sheet rather than reconstructed.
6.3 The arm changes the electronics: the 11th processor
The defining fact about the HERO 2000’s arm is not mechanical at all — it is that fitting the arm adds a processor to the robot. The HERO 2000 is a multiprocessor machine (Vol. 2): an Intel 8088 master delegates real-time work to a set of Intel 8042 UPI (Universal Peripheral Interface) slave processors, one dedicated to each subsystem — motor control, sonar, the keypad/display/real-time clock, and communications (HERO 2000 spec sheet). In its base configuration the robot carries on the order of six processors. Adding the arm brings the count up.
The arm ships with its own dedicated arm-motor 8042 UPI slave and a matching Arm-Controller card that plugs into the passive backplane’s card cage (Vol. 3; selectric.org). The arm’s UPI is the slave that takes charge of moving the arm’s joints, just as the motor-control UPI takes charge of the drive wheels — the master 8088 issues high-level commands and the arm processor handles the moment-to-moment joint control. This is why Wikipedia’s count of HERO 2000 processors rises to eleven “8-bit peripheral microprocessors” specifically in the arm-equipped configuration (Wikipedia, “HERO (robot)”): the arm is the 11th processor in the fully-loaded machine, and the Arm-Controller is the card that carries it. A HERO 2000 without the arm simply does not have that processor or that card; fitting the arm is, in effect, plugging an extra computer into the robot.

The architectural consequence is worth stating plainly, because it is what makes the HERO 2000’s arm different in kind from the HERO 1’s. On the HERO 1, the arm is driven by the robot’s single 6808 processor like everything else (Vol. 1; HERO 1 deep dive). On the HERO 2000, the arm brings its own dedicated controller, so the master 8088 is never tied up sequencing joint motions — it hands the job to the arm’s UPI and moves on. The cross-references for the multiprocessor scheme are Vol. 2 (the 8088-master / 8042-slave architecture) and Vol. 3 (the card cage and the documented card set: CPU, Memory, Motor Controller, Arm Controller, Floppy Controller, and the head Interface card).
6.4 How the arm is driven: cables and pulleys
The richest description of the arm’s actual mechanism comes not from the factory spec sheet but from the firsthand restoration writeup at selectric.org (selectric.org/ hero2000). That account documents the arm as a cable-and-pulley mechanism rather than a set of motors mounted directly at each joint: the wrist is moved by wrist cables, and the upper arm is driven through a torso cable-and-pulley system (Selectric). In other words, motors located in or near the torso transmit their motion out to the distant joints through cables routed over pulleys — a tendon-drive arrangement that keeps the heavy actuators close to the body and the moving links light.
That detail is gated to Selectric specifically, because it comes from a restorer working on a physical machine rather than from the spec sheet. The same writeup records a concrete failure mode of the mechanism: during the restoration, one of the wrist cables broke (Selectric). For anyone restoring a HERO 2000 today this is the salient warning — the cables are the wear point of the arm, and a broken wrist cable is a real and documented hazard of bringing an old unit back to life. Vol. 9 (acquisition and restoration) carries the broader restoration picture; this volume notes the cable fragility because it is specific to the arm.
Beyond “cables and pulleys driven from the torso, with a documented wrist-cable break,” the record does not give the gear ratios, cable routing, motor sizes, or feedback method of the arm, and none of those is asserted here.
6.5 Where the arm sits in the HERO line
The arm is also the clearest single axis on which to compare the three HEROs as manipulating machines:
Table 2 — manipulating machines
| HERO 1 (ET-18) | HERO Jr (RT-1) | HERO 2000 (ET-19) | |
|---|---|---|---|
| Arm | Optional 5-axis arm + gripper | None | Optional multi-joint arm + gripper |
| Driven by | The robot’s single 6808 | — | Dedicated arm 8042 UPI + Arm-Controller card |
| Payload | (see HERO 1 dive) | — | ~1 lb (spec sheet) |
| Documented joints | Arm joint map per ET-18 manual | — | Shoulder 0–120°, elbow 0–180°, wrist −179°/+180° |
Three points stand out. First, the HERO Jr has no arm at all — it is a fixed-head,
rear-driven consumer robot built around personality programs, not manipulation (HERO Jr
deep dive; _shared/comparison.md). The arm is what separates the two educational
HEROs from the consumer one. Second, where the HERO 1 documents its arm as a 5-axis
mechanism, the HERO 2000’s spec sheet documents three named joints plus a gripper but
gives no total axis count — so this volume deliberately does not put a single number on
the HERO 2000’s “axes,” and the table above lists the documented joints rather than a
count. Third, the HERO 2000 arm is the only one of the three that is, in computing
terms, its own processor: fitting it is the difference between a six-processor robot
and an eleven-processor one (Wikipedia; spec sheet).
6.6 What remains unclaimed
To keep the record honest, the following arm specifics are not documented in the sources gathered for this deep dive and are left explicitly unclaimed:
- The arm’s total number of axes / degrees of freedom (three joints plus a gripper are documented; no total is stated).
- The arm’s reach, extended length, or working envelope.
- The gripper’s opening span, jaw geometry, or clamping/grip force.
- Joint speeds, acceleration, or cycle times.
- The arm’s gear ratios, cable routing, motor specifications, or feedback method (only “cable-and-pulley, driven from the torso” is documented, via Selectric).
The figures that are documented — ~1 lb payload, shoulder/arm 0–120°, elbow 0–180°,
wrist pivot −179° to +180°, and the added arm UPI / Arm-Controller card — are gated
above to the HERO 2000 spec sheet (hero.dsavage.net), Wikipedia, and the Selectric
restoration writeup. The factory ET-19 Technical Manual remains the primary a
restorer or builder should consult for the arm’s complete and definitive
specification.
Comments (0)