RoboDog · Volume 4
Cross-cutting Building Blocks
Every quadruped robot — whether a US $289 toy or a US $75,000 industrial machine — is assembled from the same seven categories of building block: actuators, motor controllers, compute, sensors, power, communications, and structural materials. The commercial platforms surveyed in Volume 3 differ not in kind but in how carefully each category was specified and integrated. This volume catalogs the component classes in each category, benchmarks the representative parts a builder is likely to encounter, and closes with decision menus and tradeoff tables that translate the component landscape into choices for a three-tier build ladder aimed at full autonomous all-weather property patrol. Because this market evolves rapidly and datasheet figures are perishable, every specification cited here is sourced from vendor pages or distributor listings accessed in June 2026 and dated accordingly.
4.1 Actuators
The joint actuator is the single most consequential choice in a quadruped build. It sets the torque budget, determines whether the robot can absorb impact passively (backdrivability), fixes the electrical power rail, constrains the motor controller selection, and accounts for 30–60 % of the total mechanical bill of materials. Five actuator classes are relevant to the build ladder.
4.1.1 Hobby Servos
A standard hobby servo integrates a small DC motor, a multi-stage plastic or metal gearbox, and a potentiometer-based position sensor in a single plastic housing. Control is via the 50 Hz PWM protocol originally designed for radio-controlled aircraft in the 1970s. No velocity or torque feedback is provided; the controller sees only a commanded angle.
The TowerPro MG996R is the canonical benchmark for this class. Its datasheet lists stall torque as 9.4 kg·cm (0.92 N·m) at 4.8 V and 11 kg·cm (1.08 N·m) at 6 V. [1] Operating voltage spans 4.8–6.6 V; mass is 55 g. [1] Unit retail cost is US $3–8 across distributors. The stall figure is a ceiling measured with the output shaft locked; the servo cannot approach that torque in continuous dynamic operation.
The class ceiling is roughly 1–2 N·m of usable torque per joint, achievable only with upgraded metal-gear variants. For a walking robot with legs carrying a body weighing more than a few hundred grams, hobby servos reach their torque, bandwidth, and feedback limits quickly. SpotMicro and Petoi Bittle (surveyed in Volume 3) both operate in this class.
4.1.2 Smart Serial Servos
Smart serial servos replace the PWM wire with a half-duplex serial bus (TTL or RS-485) that supports torque, velocity, and position commands with closed-loop torque and velocity readback at each joint. The Dynamixel series from ROBOTIS is the reference product line in this class for open-source robotics.
The Dynamixel XH430-W350 is a mid-tier unit that delivers 3.4 N·m stall torque in an 82 g, 28.5×46.5×34 mm housing at a 12 V supply. [2][3] Resolution is 4,096 steps across the full rotation range. Operating modes include current control, velocity control, position control, extended position control, current-based position control, and PWM mode — enabling both rigid position holds and compliant torque-mode operation. [3] ROBOTIS US pricing as of June 2026 is US $395.89 for the T-variant (TTL bus) and US $413.89 for the R-variant (RS-485). [2]
The older Dynamixel MX-28AT provides 2.5 N·m stall torque at comparable voltage and is widely used in existing research platforms. [4] Both XH and MX series servos are used in Mini Pupper 2 and various Stanford Pupper lineage builds.
Smart serial servos are the correct actuator choice for Tier-1 educational builds that require genuine torque feedback and multi-mode control, but their torque ceiling (roughly 3–4 N·m for the most powerful standard units) and series resistance to impact loads limit them to indoor, low-speed, low-inertia applications.
4.1.3 Quasi-Direct-Drive BLDC Actuators

Quasi-direct-drive (QDD) actuation pairs a high-torque-density outrunner brushless motor with a single low-ratio gearbox (typically 6:1 to 12:1) and drives it with a field-oriented control (FOC) current controller that can produce commanded torques with high fidelity. Because the gear ratio is low, the reflected inertia at the output shaft is small, and the mechanism is backdrivable — an external force can push the joint without overloading the drivetrain. This is the property that enables dynamic legged locomotion: the robot can absorb impacts, comply with terrain irregularities, and execute stable trotting and bounding gaits that hobbyist servo designs cannot.
The CubeMars AK80-9 V3.0 is the most widely cited representative unit in the community. Published specifications from the CubeMars product page (June 2026) list peak torque at 22 N·m, rated torque at 9 N·m, and rated speed at 390 rpm on a 48 V supply. [5] Mass is 490 g; dimensions are Ø98×38.5 mm. [5] A 9:1 planetary gearbox, 16-bit magnetic encoder, and FOC driver are integrated into the single housing. Operating temperature spans -20 °C to 50 °C; backlash is 15 arcminutes. [5]
Pricing shows a discrepancy across CubeMars distribution channels: the product detail page lists US $479.90 [5] while the official online store (store.cubemars.com) listed the same unit at US $579.90 (sold out at time of access). [6] Both figures are included here because pricing inconsistencies across CubeMars sales channels have been reported by the community and a buyer should confirm at point of purchase.
The MIT Mini-Cheetah actuator, which informed the CubeMars and T-Motor AK-series design lineage, targeted 17 N·m peak in a 6:1 single-stage configuration — a figure broadly corroborated by the AK80-9’s 22 N·m with 9:1. The Stanford Doggo, the pioneering open-source QDD platform, operated in the same torque class at a sub-US $3,000 whole-robot BOM. [7]
QDD actuators require 24 V to 48 V power rails, CAN or RS-485 communication, and a motor controller capable of FOC current control. At roughly US $300–$600 per joint depending on the specific unit and source, the per-leg cost for a 3-DOF leg runs US $900–$1,800, making a 12-DOF robot cost US $3,600–$7,200 in actuators alone before structural, compute, or sensor spend.
4.1.4 Planetary-Geared BLDC Actuators
Planetary-geared BLDC actuators increase the gear ratio beyond QDD range (typically 20:1 to 100:1) to achieve higher holding torque with a smaller, lighter motor. The tradeoff is increased reflected inertia and reduced backdrivability: at higher gear ratios, motor-side inertia and gearbox friction dominate the output shaft dynamics, and the mechanism resists backdriving. This makes planetary-geared BLDC suitable for slower, more positionally precise applications (robotic arms, linear actuators) but reduces suitability for dynamic legged locomotion.
In the DIY quadruped space, planetary-geared BLDC units occupy the space between smart servos and QDD: they produce moderate torque (5–20 N·m typically) with reasonable backdrivability if the ratio is kept at 20:1 or below, but progressively stiffen the joint as ratio increases.
4.1.5 Harmonic Drive Actuators
Harmonic drive (strain wave) gearboxes achieve reduction ratios from 30:1 to 320:1 in a single stage with near-zero backlash. [8] This makes them attractive for high-precision robotic arms and joints where positioning accuracy matters more than compliance. However, harmonic drives are not backdrivable at high ratios: friction in the wave generator and flexspline is amplified by the gear ratio and the inverse of the backward efficiency, causing the mechanism to resist external forces. [8]
The ANYmal robot from ETH Zürich uses a harmonic drive at 100:1 combined with a series elastic actuator (SEA) — a compliant element inserted between the gearbox output and the link — to recover compliance that the gearbox eliminates. [9] Boston Dynamics uses harmonic drives in Spot and Atlas with impedance control in software to achieve apparent compliance. [9] Both approaches require either significant mechanical complexity (SEA springs and their sensing) or highly sophisticated real-time control software.
A build without a full research team behind it and without an available SEA design should avoid harmonic drives in leg joints. The appropriate niche is arm/wrist joints requiring precision positioning and negligible impact loading.
4.1.6 Actuator Selection Summary
Table 1 — Actuator Selection Summary
| Actuator class | Peak torque (typical) | Mass (typical) | Backdrivable | Protocol | Tier fit |
|---|---|---|---|---|---|
| Hobby servo (MG996R class) | ≤1.1 N·m [1] | 55 g | No | PWM | Tier 1 (learning only) |
| Smart serial servo (Dynamixel XH430) | 3.4 N·m [2] | 82 g | Partial (via current mode) | TTL / RS-485 | Tier 1 (capable) |
| QDD BLDC (AK80-9 V3.0) | 22 N·m peak, 9 N·m rated [5] | 490 g | Yes | CAN / MIT protocol | Tier 2–3 |
| Planetary BLDC (20:1 range) | 10–30 N·m typical | 200–600 g | Partial | CAN / UART | Tier 2 |
| Harmonic drive | 30–200 N·m typical | 200–800 g | No | N/A (passive gearbox) | Arm/wrist only |
Backdrivability is a property of the complete actuator system, not the motor alone. “Partial” indicates that current-mode control can reduce effective joint stiffness but cannot eliminate gearbox friction.
4.2 Motor Controllers
A motor controller converts a high-level torque, velocity, or position command into phase currents that drive a brushless motor. For legged robots the dominant algorithm is field-oriented control (FOC), which decomposes phase currents into a flux-producing component and a torque-producing component, enabling precise torque control at any rotor speed. Three open-source controllers dominate the community; one family of integrated-driver actuators removes the controller from the bill of materials entirely.
4.2.1 ODrive S1
The ODrive S1 from ODrive Robotics (formerly the open-source v3.6 platform) is a single-axis FOC controller operating on 12–48 V (maximum 50.5 V) with 40 A continuous current when mounted to an adequate heat spreader. [10] The board measures 66×50 mm and weighs 35 g without screw terminals or 55 g with them. [10] Control loop runs at 8 kHz; PWM frequency is 24 kHz. Encoder interfaces include the onboard MA702 absolute magnetic encoder and offboard quadrature, Hall, SPI, and RS-485 sensors. [10] Control interfaces span USB, UART, STEP/DIR, analog voltage, PWM, and CAN. [10] US price as of June 2026 is US $149 for a single unit, dropping to US $145 at 40 units and US $143 at 100+ units. [10]
ODrive S1 is the reference controller for builds using non-integrated motors because of its long community history, good documentation, and support for an exceptionally wide range of encoder types. Its 8 kHz control loop is adequate for most quadruped applications.
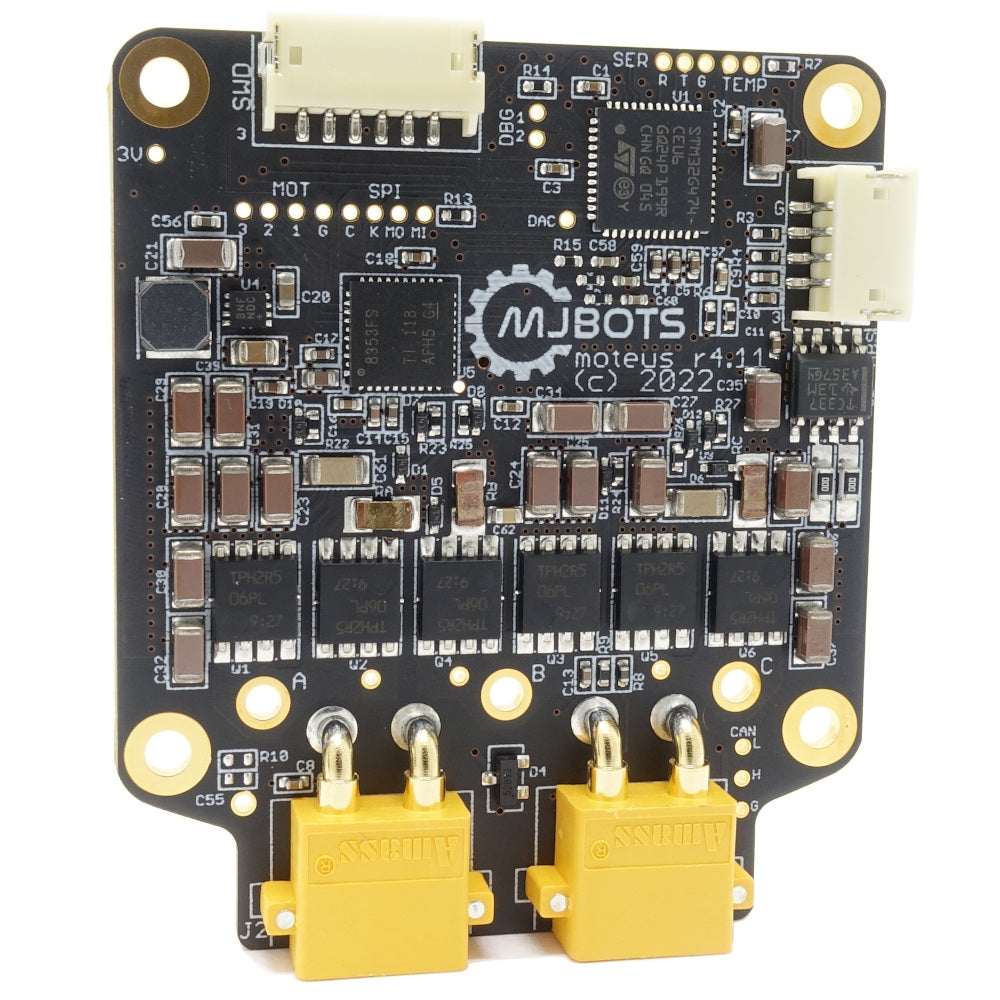
4.2.2 moteus r4.11
The moteus r4.11 from mjbots is a compact single-axis FOC controller targeting 10–44 V (up to 10S LiPo) with a peak electrical power of 900 W at 30 V. [11] Phase current limits are 100 A peak, 32 A continuous with thermal management, and 12 A continuous uncooled. [11] The board occupies 46×53 mm and weighs 14.2 g. [11] An STM32G4 microcontroller running at 170 MHz drives the control loop at 15–30 kHz with PWM switching at 15–60 kHz. [11] Communications use 5 Mbps CAN-FD — the fastest data rate in the comparison class. [11] Operating temperature extends to -40 °C to 85 °C. [11]
The moteus is the MIT Mini-Cheetah’s controller of choice in many community reproductions and is the reference hardware for the mjbots Quad A1 (an open-source all-season quadruped). US pricing as of June 2026 is US $94 per unit, US $86 for orders of 10–99, and US $78 at 100+ units. [11]
At US $94 and 14.2 g, the moteus r4.11 offers the best electrical power density per dollar of any open-source controller in this class. Its primary limitation is that it requires an external encoder (the actuator must provide one, as in the AK-series integrated units).
4.2.3 VESC 6 MkVI
The VESC (Vedder Electronic Speed Controller) platform is a long-established open-source FOC controller with wide community firmware support, three-phase shunts, a 9-axis IMU, and broad motor compatibility. [12] The MkVI revision adds a second UART port, software-adjustable sensor voltage, and a spin-to-start deactivation option. The HP variant raises continuous output to approximately 200 A burst. [12] Pricing from TRAMPA Boards (UK) as of June 2026 is £200 per unit (approximately US $250 at current exchange) for single units and £182.50 each for four. [12]
VESC is most commonly seen in electric skateboard builds but has been adopted by quadruped builders who want rich firmware features (regenerative braking, traction control, configurable current/voltage/RPM limits) and a large existing community. Its mass and form factor are larger than moteus r4.11, and CAN communication speed is lower (standard CAN vs. CAN-FD).
4.2.4 Integrated-Driver Actuators
The CubeMars AK series, Dynamixel servos, and several other integrated actuators include the motor controller on the actuator PCB. This eliminates a discrete controller from the BOM and wiring harness, reduces integration complexity, and moves power electronics into the joint itself — closer to the motor, reducing cable inductance. The tradeoff is that updating or replacing the controller requires replacing the whole actuator, and the integrated driver may be less configurable than a standalone controller.
For Tier-1 builds, Dynamixel’s integrated approach is almost always the right choice. For Tier-2 and Tier-3 builds using QDD actuators, the AK-series integrated approach (CAN bus, MIT protocol) is the community norm.
4.3 Compute Classes
A quadruped’s compute stack spans from real-time microcontrollers running joint-level control loops (sub-millisecond latency required) to application processors running perception and planning (latency of tens to hundreds of milliseconds acceptable). Most designs separate these layers: a microcontroller manages actuators; a single-board computer or embedded AI module handles navigation, mapping, and autonomy.
4.3.1 Microcontrollers (MCU)
The joint-level control loop — reading encoders, computing torque commands, running FOC or PID — requires deterministic execution at 1–15 kHz. General-purpose operating systems (Linux) are not real-time and introduce scheduling jitter that degrades control quality. Dedicated MCUs fill this role.
The STM32G4 (as used in moteus r4.11) and STM32F4 (as used in ODrive) are the community standard for actuator control, running at 170 MHz and 168 MHz respectively. The ESP32 is common in lower-power Tier-1 builds (Mini Pupper 2 uses one per leg), offering 240 MHz dual-core Xtensa with on-chip WiFi and Bluetooth. NXP RT family MCUs appear in higher-end research platforms.
MCUs never run perception algorithms, ROS nodes, or neural networks. They communicate up to the application processor via CAN, UART, SPI, or custom protocols.
4.3.2 Raspberry Pi 5
The Raspberry Pi 5 (8 GB variant) offers a Broadcom BCM2712 quad-core 64-bit ARM Cortex-A76 running at 2.4 GHz, 8 GB LPDDR4X-4267 memory, 802.11ac WiFi, and Bluetooth 5.0/BLE. [13] Performance is approximately 2–3× that of the Raspberry Pi 4 on CPU tasks. [13] The 8 GB variant is priced at US $175 through official distributors. [13]
The Pi 5 is the correct choice for Tier-1 builds. It runs ROS 2 natively on Ubuntu 24.04 or Raspberry Pi OS, supports stereo depth cameras (OAK-D-Lite, RealSense), and can handle basic visual obstacle detection at useful frame rates. The GPU (VideoCore VII) does not support NVIDIA CUDA and is therefore unsuitable for neural network inference workloads heavier than a lightweight classification network.
4.3.3 Jetson Nano (Note: EOL)
The Jetson Nano Developer Kit (model P3448-0000) was officially discontinued by NVIDIA in October 2023, with public support — driver updates, OS images, and security patches — ending in June 2024. [14] The module is available through January 2027, but NVIDIA recommends all new designs transition to the Orin family. [14] A Tier-2 or Tier-3 build starting in 2026 should not target the Nano.
4.3.4 Jetson Orin NX
The Jetson Orin NX module targets the mid-range AI inference workload that a capable outdoor patrol robot requires — running object detection, depth estimation, and SLAM algorithms simultaneously. The 8 GB variant delivers 70 TOPS; the 16 GB variant delivers 100 TOPS at up to 25 W. [15][16] With JetPack 6.2 and Super Mode enabled (same hardware, higher clock frequencies), the 16 GB variant reaches 157 TOPS at up to 40 W. [16]
The 16GB Orin NX at 100 TOPS (standard) or 157 TOPS (Super Mode) is the recommended compute for a Tier-2 build that needs onboard neural network inference for navigation and obstacle detection, without the cost and weight premium of the AGX Orin.
4.3.5 Jetson AGX Orin
The Jetson AGX Orin 64 GB module delivers 275 TOPS from an NVIDIA Ampere GPU with 2,048 CUDA cores and 64 tensor cores, a 12-core ARM Cortex-A78AE CPU, and 64 GB LPDDR5 at 204.8 GB/s bandwidth. [17] Power modes span 15 W to 60 W (MAXN mode). [17]
The AGX Orin is the correct compute tier for a Tier-3 all-weather autonomous patrol build that runs a full perception stack (lidar SLAM, camera fusion, semantic segmentation, path planning) simultaneously. The cost premium over the Orin NX is significant — module pricing through Arrow Electronics runs above US $1,000 — but the inference headroom it provides eliminates the need to optimize neural networks for a constrained platform.
4.3.6 x86 (Mini PC / Intel NUC)
x86 mini PCs (Intel NUC, Framework 13, various Chinese OEMs) provide the highest raw compute per dollar but introduce several unfavorable tradeoffs for quadruped robotics: passive cooling cannot handle full CPU load without a fan (vibration, noise, dust ingestion risk), power consumption under load commonly exceeds 30–60 W, board form factors are not designed for vibration mounting, and there is no GPU acceleration for CUDA-based inference workloads.
x86 is appropriate as a tethered development workstation for simulation and training, not as onboard compute in a mobile robot subject to vibration and weather.
4.4 Sensors
4.4.1 Inertial Measurement Unit (IMU)
The IMU provides the robot’s orientation estimate in the world frame — essential for balance control, gait state estimation, and determining whether the robot is on a slope. The minimum requirement is a 6-axis IMU (3-axis accelerometer + 3-axis gyroscope). A 9-axis IMU adds a magnetometer for compass heading, though magnetometer readings are unreliable near motors and steel chassis members.
The Bosch BMI088, widely used in research quadrupeds and flight controllers exposed to vibration, is a 6-axis MEMS IMU in a 3×4.5×0.95 mm LGA package rated for ±3 g to ±24 g acceleration and ±2,000 °/s angular rate, with maximum gyroscope bias drift of 2°/hour. [18] The BMI088 is specifically characterized for high-vibration robotics and drone environments. [18] Communication is I2C or SPI. The less expensive MPU-6050 (6-axis, ~US $1–3 breakout) is adequate for Tier-1 educational builds where sensor noise is not the limiting factor.
The Intel RealSense D435i (see depth cameras below) integrates a BMI055 IMU in the same housing, providing a synchronized depth-plus-IMU data stream useful for visual-inertial odometry.
4.4.2 Joint Encoders
Leg joints require angle sensing for position and velocity feedback. Absolute magnetic encoders are the community standard because they read shaft angle without requiring a homing sequence on power-up. The AMS (ams-OSRAM) AS5048A is the most widely used IC, providing 14-bit absolute angle via SPI or PWM at a typical board-level cost under US $5.
The Dynamixel series integrates encoders internally. CubeMars AK-series actuators include a 16-bit magnetic encoder in the housing. [5] Builds using naked brushless motors require an external encoder disc and IC mounted at the joint.
4.4.3 Foot-Contact Sensors
Detecting ground contact at the foot is necessary for reliable state estimation (knowing which legs are in stance versus swing) and for terrain adaptation. The two common approaches are force-sensitive resistors (FSRs) — cheap (<US $5), resistive, analog — and miniature load cells — more accurate but requiring a Wheatstone bridge amplifier. The Stanford Doggo, MIT Mini-Cheetah, and most research platforms use load cells or strain gauges in the foot structure. Tier-1 builds commonly omit foot contact sensing and rely on kinematic estimators instead.
4.4.4 RGB and Depth Cameras
Intel RealSense D435i. A stereo depth camera with an integrated BMI055 IMU in a 90×25×25 mm housing. Depth range spans approximately 0.3–3 m at the nominal operating conditions, with the usable range defined primarily by stereo baseline and lens focal length. [19] Depth resolution is 1,280×720 at 30 fps; depth FOV is 87°×58°. [19] USB 3.0 connection; ROS 2 drivers are mature and actively maintained. Pricing from DigiKey as of June 2026 is US $343.75. [20] Intel’s RealSense hardware division has restructured; the D435i remains available for purchase as of this writing but long-term production is uncertain — buyers for new designs should confirm lead times and consider alternatives.
Luxonis OAK-D Pro. The OAK-D Pro integrates an Intel Myriad X Vision Processing Unit (4 TOPS) directly on the camera, enabling neural network inference without offloading to the host computer. Ideal depth range is 70 cm–12 m (stereo baseline wider than RealSense), significantly extending the useful obstacle-detection envelope. [21] An IR dot projector improves depth accuracy on textureless surfaces, and an IR LED enables operation in darkness. [21][22] Power consumption reaches 7.5 W. US retail pricing is US $429 for the standard variant and US $579 for the PoE variant. [21]

For a Tier-2 outdoor build, the OAK-D Pro’s extended depth range, onboard inference, and night-vision capability justify its premium over the D435i. The D435i’s 0.3 m minimum distance is an advantage for confined indoor navigation, but the 3 m maximum depth is a significant constraint for outdoor path planning at walking speed.
4.4.5 2D LiDAR
Two-dimensional LiDAR sensors rotate a single laser beam in a plane, producing a 360° range scan — a fundamental sensor for indoor SLAM and obstacle detection in a horizontal plane.
The Slamtec RPLIDAR A3 scans a 25 m radius at up to 16,000 samples per second with 0.225° angular resolution. [23][24] US pricing from RobotShop as of June 2026 is US $645.42 (regular price US $717.12 during a sale period). [24]
The Slamtec RPLIDAR S2, a newer dToF (direct time-of-flight) model, extends range to 30 m, raises scan rate to 32,000 samples per second, improves angular resolution to 0.1125°, and adds IP65 protection for outdoor use in up to 80 klux sunlight. [25] RobotShop pricing as of June 2026 is US $417.90. [26] The S2 is more capable at a lower price than the A3 and is the recommended choice for new designs.
2D LiDAR provides no vertical information and cannot detect floor-level obstacles (curbs, roots) below the sensor plane or overhead clearance. Robots navigating complex outdoor terrain require 3D sensing for reliable all-weather autonomous patrol.
4.4.6 3D LiDAR

The Livox Mid-360 (Livox is a DJI subsidiary) is a hybrid solid-state 3D LiDAR covering 360° horizontal by 59° vertical FOV, outputting up to 200,000 points per second, with a 0.1 m minimum detection distance and a maximum range of 70 m at 80% target reflectivity (40 m at 10% reflectivity). [27] Weight is 265 g; dimensions are 65×65×60 mm. IP67 weatherproofing and an integrated ICM-40609 IMU make it purpose-built for mobile robots exposed to weather. [27] Average power consumption is 6.5 W. [27] The official Livox retail price is approximately US $749; [28] gray-market listings on AliExpress range from US $480–$550 (no warranty, provenance unverifiable). [28] US-based distributors list the Mid-360 at substantially above the official retail figure — Vol 7 (Build 3: The Full-CNC Heavy-Duty Finale) confirmed two US distributors pricing the unit at approximately US $4,275, roughly 5.7× the official Livox retail figure. [29][35] Builders planning Tier-3 budgets should use the distributor price rather than the livoxtech.com listing as the planning baseline. A second-generation Mid-360S has been announced by Livox with additional performance improvements; buyers should confirm current availability and pricing at order time.
The Livox Mid-360 is used in the DEEP Robotics X30 (four units per robot) and as an upgrade module on the Unitree Go2 Edu Plus. It is the recommended 3D LiDAR for any build targeting all-weather outdoor navigation and represents one of the most significant per-unit costs on a Tier-3 bill of materials.
4.4.7 GPS / RTK
For outdoor patrol that must return reliably to a base station and for geo-referenced mission waypoints, GPS is required. Standard GPS accuracy (3–10 m circular error probable) is insufficient for structured patrol of a confined property without additional mapping. RTK (real-time kinematic) GPS achieves 1–2 cm horizontal accuracy by comparing phase data from the rover antenna against a fixed base station or a NTRIP correction stream. The ublox ZED-F9P is the community standard RTK receiver at approximately US $180–$230 depending on supplier. A two-antenna configuration additionally provides accurate heading without a magnetometer.
4.4.8 Thermal Cameras
For night-time detection of warm-bodied intruders, thermal cameras detect temperature differences in the scene. The FLIR Lepton is a compact longwave infrared sensor (8–14 µm) in a small module format (160×120 or 320×240 pixel) that connects via SPI and communicates via I2C. Lepton modules are available from Digi-Key and Mouser for approximately US $100–$200 depending on resolution. At Tier-3 the integration of a Lepton or equivalent into the compute pipeline adds meaningful intruder-detection capability for darkness scenarios.
4.5 Power
4.5.1 Cell Chemistry: Li-ion vs. LiPo
Lithium-ion cylindrical cells (18650 and 21700 formats) achieve energy densities of 250–300 Wh/kg in the NMC chemistry used in most commercially available robotics packs. [30] The 21700 format (21 mm diameter × 70 mm length) offers higher capacity per cell than the 18650 (18×65 mm) and is the current optimum for custom pack construction. [30] At 3.7 V nominal per cell, a 6S configuration (six series cells) produces 22.2 V nominal / 25.2 V fully charged.
Lithium polymer (LiPo) cells are used in most RC-heritage quadruped builds. Their energy density spans 100–265 Wh/kg — a range that reflects a wide variety of cell formulations from low-density soft-pouch cells to high-density competition cells. [31] LiPo chemistry allows higher continuous discharge rates (C-rating) than most cylindrical Li-ion: a 30C rated 5 Ah LiPo pack can theoretically supply 150 A instantaneously, which matters for the brief current spikes during leg impact events. [32]
The practical choice for most DIY quadruped builds is a LiPo pack: cheaper per watt-hour at low volume, pre-assembled in standard form factors with XT60 or XT90 connectors, and familiar to the RC community. A 6S 5,000 mAh LiPo (111 Wh) weighs approximately 350–400 g and costs US $40–$80, giving a rough 1–2 hour runtime for a lightweight Tier-1 machine at moderate gait speed. Custom cylindrical Li-ion packs are appropriate for Tier-3 builds where cycle life (500–1,000+ full cycles to 80% vs. 200–400 for RC-grade LiPo), thermal management, and shape flexibility justify the higher cell and BMS cost.
4.5.2 Battery Management System (BMS)
Any multi-cell pack requires a BMS to prevent individual cells from overcharging (above ~4.2 V per cell), over-discharging (below ~2.5–3.0 V per cell), and to balance cells during charging. For a quadruped’s main traction battery, the BMS must also tolerate high peak discharge currents; a BMS rated for continuous 50 A and peak 150 A is appropriate for a 48 V Tier-3 system. Commercial integrated BMS/PCM units (Daly, JKBMS) in the 3S–16S range with CAN or RS-485 telemetry are available for US $30–$100 and provide cell-level voltage and temperature data to the compute stack — data needed to implement graceful low-battery return behaviors.
4.5.3 Power Rails and Distribution
A typical Tier-2/3 build requires at least three power rails:
- 48 V (or 24 V) traction rail — feeds the QDD actuators directly from the main battery; current capacity sized to worst-case combined actuator stall (12 joints × rated current)
- 12 V or 19 V compute rail — Jetson Orin NX/AGX and associated peripherals; a buck converter from the traction rail (efficiency > 90 %)
- 5 V logic rail — MCUs, encoders, IMU, and communication hardware; a further buck converter or linear regulator from the 12 V rail
Sequencing and protection between rails (reverse polarity protection, fuses at each branch, soft-start on compute rail to prevent inrush causing actuator brownout) add complexity but are essential for a platform that will be powered on and off repeatedly in the field.
4.5.4 Runtime Budget Example
For a Tier-2 machine weighing approximately 8–10 kg with four 3-DOF QDD legs (12 joints), an Orin NX module, and the sensor suite above:
- Actuator average draw at trot: approximately 3–6 A at 48 V (typical 10–30% duty cycle per joint) = 144–288 W
- Compute + sensors: approximately 30–50 W (Orin NX ~25 W, LiDAR 6.5 W, cameras 5 W, misc.)
- Total system draw: approximately 175–340 W
- A 48 V 10 Ah pack (480 Wh) yields approximately 85–165 minutes of operation
These figures are order-of-magnitude estimates. Actual draw depends heavily on gait, terrain, and software configuration; instrumented telemetry from the BMS is the only reliable runtime predictor.
4.6 Communications
4.6.1 WiFi
802.11ac (WiFi 5) is the baseline wireless link for a patrol robot operating within ~50–100 m of a home access point. The Raspberry Pi 5 and Jetson Orin NX both include 802.11ac onboard. Round-trip latency over a well-configured 5 GHz home network is typically 10–30 ms — adequate for teleoperation from a local monitoring station. Throughput at 5 GHz is sufficient for a single H.264-compressed video stream plus telemetry.
For better outdoor range, an external 802.11ax (WiFi 6/6E) module or a dedicated access point mounted at a high point provides more reliable link quality in a structured property-patrol scenario.
4.6.2 Bluetooth
Bluetooth 5.0 / BLE, also integrated on both the Pi 5 and Jetson Orin NX, provides a convenient short-range (10–40 m typical) low-power link for manual controller input (game controllers, BLE HID devices) and commissioning. It is not suitable as the primary data link for a patrol robot but eliminates the need for a dedicated USB receiver for a gamepad during development.
4.6.3 LTE / 4G
A cellular modem expands the operational radius from the access-point footprint to anywhere with carrier coverage. This is relevant for a patrol robot that monitors a large property, or for out-of-range recovery. Modules (Quectel EC25, Sierra Wireless EM7455) connect via USB or M.2 and present a network interface to Linux. Adding LTE requires a SIM data plan, increases cost by US $50–$200 for the modem plus ongoing subscription, and introduces ~100 ms+ round-trip latency that precludes reactive teleoperation. For autonomous roaming patrol, the latency is acceptable; for direct operator control, it is not.
4.6.4 ROS 2 Networking
The Robot Operating System 2 (ROS 2) uses the Data Distribution Service (DDS) middleware for node-to-node communication. On a single-board computer, all ROS 2 nodes communicate in shared memory. Across a network, DDS publishes messages via UDP multicast. Discovery, serialization, and quality-of-service configuration are handled by the chosen DDS implementation (Fast DDS, Cyclone DDS).
For a standalone robot, the entire ROS 2 stack runs on the onboard compute and the WiFi/LTE link is used only for monitoring and teleoperation — not for real-time control. Motor controllers communicate with the application processor via CAN (moteus at 5 Mbps CAN-FD) or via dedicated ROS 2 hardware interface nodes running on the main SBC.
4.6.5 CAN Bus
Controller Area Network (CAN) is the standard inter-device bus for actuator communication in research and commercial quadrupeds. CAN-FD (Flexible Data rate) raises the data payload to 64 bytes and the bit rate to 5–8 Mbps (vs. 1 Mbps for classic CAN), enabling more actuators per bus at higher control-loop rates. The moteus r4.11 uses CAN-FD at 5 Mbps. [11] CAN is robust against the electrical noise environment of high-current motor drives, requires only two wires plus ground, and allows ring or daisy-chain topologies well-suited to the per-leg wiring harness of a quadruped.
4.7 Materials and Fabrication
4.7.1 FDM Filaments
Fused deposition modeling (FDM) is the primary structural fabrication method for Tier-1 and Tier-2 builds. Four filament families are relevant:
PLA-CF (carbon-fiber-reinforced PLA) provides the highest stiffness of any commodity FDM filament, prints at standard PLA temperatures (200–220 °C on a hardened steel nozzle to avoid abrasive wear), and is easy to dial in. [33] Its limitations are brittleness under impact (rather than bending, it fractures), low glass transition temperature (approximately 55–60 °C — unsuitable for enclosures that see direct summer sun), and poor moisture resistance. PLA-CF is the correct choice for indoor Tier-1 structural members in a dry, climate-controlled environment.
PETG-CF (carbon-fiber-reinforced PETG) trades some stiffness for significantly better impact absorption, moisture resistance, and a higher effective service temperature (≈ 80 °C heat deflection). [33][34] A 2026 study of PETG-CF composites for drone frames (analogous structural loading to a quadruped leg) found rectilinear infill at full layers achieving the highest tensile performance (35 N/mm² peak), while Support Cubic infill maximized impact energy absorption at 6.5 J per sample. [34] PETG-CF is the recommended filament for structural leg components in a Tier-2 build that will see outdoor use and occasional impact.
ASA (acrylonitrile styrene acrylate) offers UV resistance and reasonable impact strength at a price comparable to PETG. It is appropriate for enclosures, cosmetic panels, and covers on a machine deployed outdoors.
Nylon (PA12, PA6-CF) is flexible enough to act as a living hinge, absorbs moisture (requiring pre-drying before printing), and provides excellent fatigue life under cyclic loading — a property relevant to foot-pad springs. PA12-CF is used in the foot pads of several commercial platforms for its combined wear resistance and vibration damping.
4.7.2 Aluminum
6061-T6 aluminum alloy is the workhorse structural material for Tier-2 and Tier-3 machined frames. Its yield strength (276 MPa) and ultimate strength (310 MPa) combined with its density (2.7 g/cm³) give a specific strength adequate for quadruped link lengths and loads, while remaining machinable on a standard 3-axis CNC router without exotic tooling. The owner’s full machine shop brings this material class within scope from the first build.
Sheet aluminum (2–4 mm) is appropriate for plates, brackets, and shoulder structures. Extruded round and square bar (12–25 mm diameter) suits link members. Wall thickness should be sized with finite element analysis or hand calculations against the maximum actuator torque at the joint; a common starting point is 3 mm wall for a 22 N·m actuator joint.
4.7.3 Carbon Fiber Reinforced Polymer (CFRP)
CFRP tubes, plates, and panels offer approximately 5–10× the specific stiffness of aluminum at roughly half the density. At Tier-3 where weight budget is tight and patrol payload is carried, CFRP link members are the correct structural choice. Procurement is straightforward from composites suppliers (Rock West, CST The Composites Store) with standard inner-diameter tubes available for press-fit with aluminum end caps and bulkheads. Machining CFRP requires diamond or carbide tooling and dust control (inhaling carbon fiber dust is a health hazard).
CFRP adds significant cost per component (US $20–$80 per meter of structural tube) compared to aluminum, but reduces leg mass — a critical parameter for dynamic locomotion, as lower distal mass reduces the actuator torque required to accelerate the leg during swing.
4.7.4 Bearings and Fasteners
Joint bearings should be ABEC-5 or better for acceptable radial runout at the control loop rates used. Sealed bearings (2RS suffix) prevent contamination ingress in outdoor use. Stainless steel bearings (SS prefix) resist corrosion in wet environments and avoid galvanic issues when mounted in aluminum housings.
Fasteners for a machine subject to vibration should use prevailing-torque locking mechanisms: nylon-insert locking nuts (Nylock, Aerotite) on all structural joints, thread-locking adhesive (Loctite 243 blue) on through-bolt threads in situations where Nylock nuts do not fit. Standard M3 steel fasteners cover most leg and joint connections; M4 and M5 are appropriate at the shoulder-to-body junction where torques are highest.
4.8 Decision Menus and Tradeoff Tables
4.8.1 Actuator Selection by Tier
Table 2 — Actuator Selection by Tier
| Build tier | Recommended actuator | Rationale |
|---|---|---|
| Tier 1 — FDM/Hobby | Dynamixel XH430-W350 (~US $400 each) [2] or MX-28 series | Torque feedback, multi-mode control, ROS 2 driver, educational ecosystem |
| Tier 2 — Mid machined | CubeMars AK80-9 V3.0 (US $480–$580) [5][6] or equivalent QDD | Backdrivability, 22 Nm peak, CAN bus, community-proven in 12-DOF builds |
| Tier 3 — CNC finale | QDD or high-ratio integrated BLDC, 40+ Nm peak | Custom sizing to weight budget; proprietary units (T-Motor AK80-64) or full custom |
4.8.2 Compute Selection by Tier
Table 3 — Compute Selection by Tier
| Build tier | Recommended compute | Notes |
|---|---|---|
| Tier 1 | Raspberry Pi 5 (8 GB, US $175) [13] | Sufficient for ROS 2, basic depth sensing, BT/WiFi control |
| Tier 2 | Jetson Orin NX 16 GB (100 TOPS, up to 157 TOPS Super Mode) [15][16] | Neural network inference for visual nav + obstacle avoidance |
| Tier 3 | Jetson AGX Orin 64 GB (275 TOPS) [17] | Full autonomy stack: SLAM, semantic segmentation, path planning, patrol scheduling |
4.8.3 Sensor Suite by Tier
Table 4 — Sensor Suite by Tier
| Sensor | Tier 1 | Tier 2 | Tier 3 |
|---|---|---|---|
| IMU | MPU-6050 breakout | BMI088 breakout [18] | BMI088 integrated into FC or compute module |
| Joint encoders | Integrated (Dynamixel) | Integrated (AK-series 16-bit) [5] | Integrated + redundant |
| Depth camera | OAK-D-Lite (basic depth) | OAK-D Pro (US $429, 12 m range, onboard VPU) [21] | OAK-D Pro W (wide-angle variant) |
| 2D LiDAR | RPLIDAR A2/A3 (~US $200–$646) | RPLIDAR S2 (US $417.90, IP65, 30 m) [25][26] | Replaced by 3D |
| 3D LiDAR | None | None (deferred to Tier 3, per Vol 6) | Livox Mid-360 (IP67, 70 m; US $749 official retail [27][28], ~US $4,275 via US distributors [29][35]) |
| GPS | None | Optional u-blox ZED-F9P RTK | u-blox ZED-F9P RTK (centimeter-level) |
| Thermal | None | Optional FLIR Lepton | FLIR Lepton 3.5 (320×240, night detection) |
4.8.4 Motor Controller Selection
Table 5 — Motor Controller Selection
| Controller | Price (2026) | Peak power | Bus | Best fit |
|---|---|---|---|---|
| ODrive S1 [10] | US $149 (single) | ~2 kW (40 A × 50 V) | CAN, UART, USB | Builds using non-integrated motors, wide encoder support |
| moteus r4.11 [11] | US $94 (single) | 900 W @ 30 V | CAN-FD (5 Mbps) | AK-series or naked BLDC + external encoder; best power density/$ |
| VESC 6 MkVI [12] | ~US $250 (single) | ~3 kW HP variant | CAN, UART, USB | Wide firmware feature set, large community |
| Integrated (AK-series, Dynamixel) | Included in actuator price | Actuator-rated | CAN / TTL | Simplest integration; controller not field-replaceable |
4.8.5 Power Budget Quick Reference
Table 6 — Power Budget Quick Reference
| Rail | Typical voltage | Load (Tier 2) | Source |
|---|---|---|---|
| Traction (actuators) | 48 V | 5–20 A average, 40 A peak (12 joints) | LiPo / Li-ion main pack |
| Compute + peripherals | 12–19 V | 2.5–5 A (30–60 W) | Buck converter from traction rail |
| Logic / sensors | 5 V | 1–3 A | Buck from 12 V rail |
| Total pack budget (Tier 2, 45 min patrol) | 48 V | ~10 Ah (480 Wh) | Commercial 48 V LiPo or 13S Li-ion custom pack |
All power figures are estimates for planning; actual consumption must be measured on the running prototype.
Sources
- TowerPro — MG996R servo datasheet (stall torque 9.4 kg·cm @ 4.8V, 11 kg·cm @ 6V; accessed 2026-06-19) — https://towerpro.com.tw/product/mg996r/
- ROBOTIS US — Dynamixel XH430-W350-T product page: stall torque 3.4 N·m; price US $395.89 (T-variant); accessed 2026-06-19 — https://www.robotis.us/dynamixel-xh430-w350-t/
- ROBOTIS eManual — XH430-W350 specifications and operating modes; accessed 2026-06-19 — https://emanual.robotis.com/docs/en/dxl/x/xh430-w350/
- ROBOTIS eManual — MX-28 specifications: stall torque 2.5 N·m; accessed 2026-06-19 — https://emanual.robotis.com/docs/en/dxl/mx/mx-28/
- CubeMars — AK80-9 V3.0 robotic actuator product page: 22 Nm peak, 9 Nm rated, 490 g, 48V, 9:1, US $479.90; accessed 2026-06-19 — https://www.cubemars.com/product/ak80-9-v3-0-robotic-actuator.html
- CubeMars Store — AK80-9 V3.0 KV100 online shop listing: US $579.90 (sold out at time of access); accessed 2026-06-19 — https://store.cubemars.com/products/ak80-9-v3-0-kv100
- IEEE ICRA 2019 — Kau & Schultz, “Stanford Doggo: An Open-Source, Quasi-Direct-Drive Quadruped” (whole-robot BOM under US $3,000, QDD actuator design principles); accessed 2026-06-18 — https://ieeexplore.ieee.org/document/8794436/
- Industrial Monitor Direct — “Robot Gearbox Torque-Speed Trade-offs in Harmonic and Planetary Drives” (reduction ratios 30:1–320:1; friction amplification; accessed 2026-06-19) — https://industrialmonitordirect.com/blogs/knowledgebase/robot-gearing-torque-speed-trade-offs-in-harmonic-and-planetary-drives
- PICEA Motion — “Why Harmonic Drives Are Essential for Quadruped Robot Joints” (ANYmal SEA + harmonic drive; Boston Dynamics applications; accessed 2026-06-19) — https://www.piceamotiondrive.com/why-harmonic-drives-are-essential-for-quadruped-robot-joints.html
- ODrive Robotics — ODrive S1 product page: US $149 single; 12–48V; 40A continuous; 66×50mm; 35–55g; accessed 2026-06-19 — https://shop.odriverobotics.com/products/odrive-s1
- mjbots — moteus r4.11 product page: US $94 single; 10–44V; 900W peak; 100A peak; 46×53mm; 14.2g; 5 Mbps CAN-FD; accessed 2026-06-19 — https://mjbots.com/products/moteus-r4-11
- TRAMPA Boards — VESC 6 MkVI product listing: £200 single (~US $250 at June 2026 exchange); accessed 2026-06-19 — https://trampaboards.com/1-x-vesc-6-mkv—170-tax-each-p-27529.html
- Raspberry Pi Foundation — Pi 5 product brief: BCM2712 2.4 GHz A76, 8GB LPDDR4X, 802.11ac, BT 5.0, US $175; accessed 2026-06-19 — https://datasheets.raspberrypi.com/rpi5/raspberry-pi-5-product-brief.pdf
- NVIDIA Developer Forums — “Jetson Nano Developer Kit EOL”: Developer Kit discontinued October 2023; public support ended June 2024; module available through January 2027; accessed 2026-06-19 — https://forums.developer.nvidia.com/t/jetson-nano-developer-kit-eol/276730
- NVIDIA Developer — Jetson modules page: Orin NX 8GB 70 TOPS; Orin NX 16GB 100 TOPS; accessed 2026-06-19 — https://developer.nvidia.com/embedded/jetson-modules
- ThinkRobotics — “NVIDIA Jetson Orin NX Module Review”: Orin NX 16GB 100 TOPS standard; 157 TOPS Super Mode (JetPack 6.2, up to 40W); accessed 2026-06-19 — https://thinkrobotics.com/blogs/product-reviews-buying-guides/nvidia-jetson-orin-nx-module-review-specs-use-cases-price-and-how-it-compares
- NVIDIA — Jetson AGX Orin technical brief: 275 TOPS; 2048 CUDA cores; 64 tensor cores; 12-core A78AE; 64 GB LPDDR5 204.8 GB/s; 15–60W; accessed 2026-06-19 — https://www.nvidia.com/content/dam/en-zz/Solutions/gtcf21/jetson-orin/nvidia-jetson-agx-orin-technical-brief.pdf
- Bosch Sensortec — BMI088 datasheet rev 1.9 (January 2024): ±3g–±24g accel; ±2000°/s gyro; 3×4.5×0.95mm LGA; 2°/hr bias drift; accessed 2026-06-19 — https://www.bosch-sensortec.com/media/boschsensortec/downloads/datasheets/bst-bmi088-ds001.pdf
- Intel — RealSense D435i product specifications: depth range ~0.3–3m, 1280×720@30fps, 87°×58° FOV, 90×25×25mm; accessed 2026-06-19 — https://www.intel.com/content/www/us/en/products/sku/190004/intel-realsense-depth-camera-d435i/specifications.html
- DigiKey — Intel RealSense D435i (82635D435IDK5P): US $343.75; accessed 2026-06-19 — https://www.digikey.com/en/products/detail/intel-realsense/82635D435IDK5P/9926004
- Luxonis — OAK-D Pro shop page: US $429 standard / US $579 PoE; 70cm–12m depth; up to 7.5W; IR dot projector; IR LED; accessed 2026-06-19 — https://shop.luxonis.com/products/oak-d-pro
- Luxonis docs — OAK-D Pro hardware page confirming depth range, VPU, and IR features; accessed 2026-06-19 — https://docs.luxonis.com/hardware/products/OAK-D%20Pro
- Slamtec — RPLIDAR A3 specification page: 0.2–25m range; up to 16,000 samples/s; 0.225° resolution; accessed 2026-06-19 — https://www.slamtec.com/en/lidar/a3spec
- RobotShop — Slamtec RPLIDAR A3: US $645.42 (sale price, regular US $717.12); accessed 2026-06-19 — https://www.robotshop.com/products/slamtec-rplidar-a3-360-laser-scanner-25-m
- Slamtec — RPLIDAR S2 specification page: 0–30m (90% reflectivity); 32,000 samples/s; 0.1125° resolution; IP65; 80 klux outdoor; accessed 2026-06-19 — https://www.slamtec.com/en/S2/Spec
- RobotShop — Slamtec RPLIDAR S2: US $417.90; accessed 2026-06-19 — https://www.robotshop.com/products/rplidar-s2-360-laser-scanner-30-m
- Livox Technology — Mid-360 specification page: 360°×59° FOV; 0.1m min; 70m max (80% reflectivity); 200,000 pts/s; 265g; 65×65×60mm; IP67; ICM-40609 IMU; 6.5W avg; accessed 2026-06-19 — https://www.livoxtech.com/mid-360
- Multiple retail and search sources — Livox Mid-360 official retail price approximately US $749; AliExpress gray-market US $480–$550; accessed 2026-06-19 — https://www.aliexpress.com/s/wiki-ssr/article/livox-mid-360-price-usd-2025
- RoboStore — Livox Mid-360 US distributor listing (substantially higher than official retail; check for bundle content differences); accessed 2026-06-19 — https://robostore.com/products/livox-mid-360-lidar
- Large.net — “18650 vs 21700 Battery” comparison: 21700 NMC energy density 250–300 Wh/kg; 3.7V nominal; accessed 2026-06-19 — https://www.large.net/news/8ju43n9.html
- Wikipedia — Lithium polymer battery: energy density 100–265 Wh/kg; accessed 2026-06-19 — https://en.wikipedia.org/wiki/Lithium_polymer_battery
- Large Battery — “High-Rate 6S2P 22.2V Packs for Quadruped Robots: 30C Burst Discharge”: 6S2P configuration; 30C instantaneous burst; accessed 2026-06-19 — https://www.large-battery.com/blog/high-rate-6s2p-22-2v-packs-30c-burst-quadruped-robots
- North Lakes Design — “PLA-CF vs PETG-CF: Selecting 3D Printing Materials for Maximum Durability” (stiffness, moisture, impact comparison); accessed 2026-06-19 — https://www.northlakesdesign.co.uk/blog/selecting-3d-printing-materials-for-maximum-durability-pla-cf-vs-petg-cf
- Scientific Reports (2026) — “Mechanical characterization of PETG–carbon fiber composite parts using 3D printing for drone frame application” (rectilinear infill 35 N/mm²; Support Cubic infill 6.5 J impact energy absorption); accessed 2026-06-19 — https://www.nature.com/articles/s41598-026-38051-3
- RoboDog Phase 1 survey, Vol 7 — Build 3: The Full-CNC Heavy-Duty Finale, BOM: Livox Mid-360 at US $4,275.00 confirmed from two US distributors (RoboStore, STEMfinity); approximately 5.7× the official livoxtech.com retail figure; 2026-06-19 (this series)
Comments (0)