Omnibot 5402 · Volume 2
The Cassette-and-Clock "Brain"
2.1 What the “brain” actually is
The chest panel of the Omnibot 5402 is silkscreened, in capital letters, “COMPUTER PROGRAMMING,” and the word computer did a great deal of work in the 1984 toy aisle. It is worth saying plainly, before any of the detail, what sits behind that label: there is no documented microprocessor, no general-purpose CPU, and no programming language in the Omnibot 5402. The consulted sources — the Omnibot 5402 manual, the theoldrobots spec sheet, and Wikipedia’s “Omnibot” entry — describe two ordinary consumer-electronics subsystems wired into a robot shell: a cassette tape deck and a digital clock with a timer and an alarm. The machine’s whole claim to “programming” is that the deck can record a stream of remote-control commands to tape and play them back, and the clock can start that playback at a chosen time (Wikipedia, “Omnibot”; theoldrobots.com).
That is the frame to carry through this volume. The Omnibot is a teleoperated record-and-replay toy. What looks like a memory is a cassette; what looks like a program is a tape recording of someone driving the robot with a remote; what looks like autonomy is an alarm clock closing a switch. None of this is a criticism — it is a genuinely clever way to make a $250 toy behave like a robot servant — but it is a different category of machine from the computer-robots elsewhere in this hub, and the difference matters enough that the rest of this volume keeps returning to it. Where a specific electrical part or IC would normally be named, the record does not name one, and this volume leaves it explicitly unclaimed rather than inventing a chip.
2.2 The cassette deck in the chest
The defining piece of hardware is a cassette tape deck mounted in the Omnibot’s chest, which slides out like a small drawer (theoldrobots.com; Wikipedia). It is an ordinary compact-cassette mechanism, and it does double duty: it will play a normal pre-recorded music cassette through the robot’s speaker, and it is the medium for the robot’s “programming.” The same transport that plays a song is the one that records and replays command sequences — there is no separate digital store.
The deck’s specifications, as transcribed on the theoldrobots spec sheet, are those of a modest mono cassette player of the period:
Table 1 — of a modest mono cassette player of the period
| Cassette-deck parameter | Value | Source |
|---|---|---|
| Format | Compact cassette, 2-track monaural | theoldrobots |
| Tape bias | Normal bias | theoldrobots |
| Speed accuracy | ±3% | theoldrobots |
| Wow & flutter | < 0.3% | theoldrobots |
| Roles | Plays music cassettes; records and replays command/speech sequences | theoldrobots; Wikipedia |
These are unremarkable numbers for a 1984 toy-grade deck — two-track mono rather than four-track stereo, normal-bias (Type I) tape, a speed held to within a few percent, and wow-and-flutter under three-tenths of a percent (theoldrobots.com). What makes them interesting is not the audio quality but the use: this same garden- variety transport is what the Omnibot uses in place of memory.
2.2.1 The drawer, and what it tells you
That the deck is a slide-out drawer in the chest is itself a clue to the design philosophy. The “programming” medium is a removable, swappable, physically handled object — a cassette an owner could pop out, label, store in a shoebox, and reload later, exactly like a music tape (theoldrobots.com). A routine recorded on Tuesday is a physical artifact you can hold; a different routine is a different tape. There is nothing to back up, no file system, no non-volatile chip whose contents matter. The contrast with a computer-robot’s RAM-and-ROM memory map could hardly be sharper, and it is deliberate: the cassette makes the abstract idea of “saving a program” into something a child already understood from their stereo.
2.3 How “programming” actually works
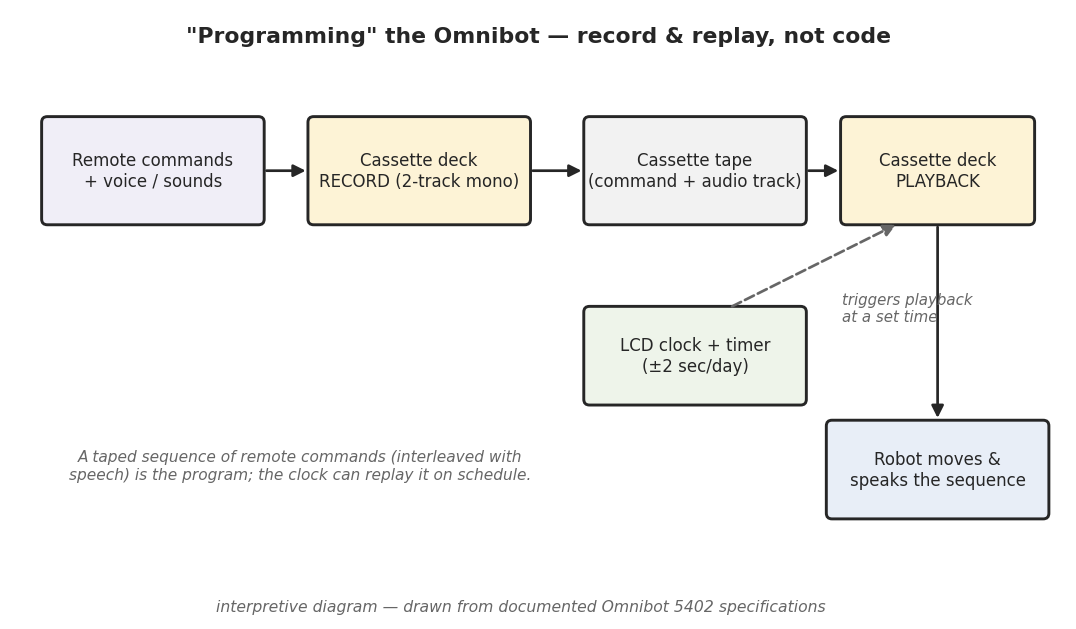
Here is the heart of the volume. On the Omnibot 5402, “programming” is recording a performance and playing it back (Wikipedia; theoldrobots.com). The steps are:
- Record. The owner drives the robot with the hand-held remote — forward, back, left, right, and whatever else the remote commands — and, if they like, speaks into the remote’s microphone to narrate or give the robot a “voice.” With the deck set to record, the whole performance is captured to the cassette: the stream of remote commands interleaved with the audio (Wikipedia; theoldrobots.com).
- Play back. Rewinding and playing that cassette re-issues the recorded command stream to the robot’s drive and functions, and plays back the recorded speech through the speaker. The Omnibot re-enacts the routine — it drives the same path it was driven, and “talks” at the same points it was made to talk (Wikipedia).
That is the entire mechanism. The cassette is the store; the tape transport, running the recording back in real time, is the “sequencer” that re-issues the commands in order. The robot is not interpreting anything — it is being driven a second time, by a recording of the first time. This is why the framing throughout the series calls the Omnibot teleoperated: even on “automatic” playback, the motions originate from a human at a remote, just time-shifted onto tape.
A few consequences follow directly from the mechanism, and they are worth stating because they are what separate a tape recording from a program:
- It is linear and timed, not logical. A recorded routine plays start-to-finish at the tape’s pace. There are no branches, conditions, variables, or loops — the cassette has no notion of “if the robot bumps something” or “repeat until.” It replays exactly what was recorded, for as long as the tape runs.
- It is open-loop. Nothing on playback checks where the robot actually is. If the carpet, the battery charge, or the starting position differs from the recording session, the robot drifts off the intended path — there is no sensor feedback correcting it (the Omnibot has essentially no navigation sensing; see Vol. 3). A routine that delivered a drink across the den on Tuesday may wander into a wall on Wednesday.
- The “memory” is analog and finite by tape length. How much can be stored is set by how much tape is on the cassette, not by a byte count. A C-60 holds more “program” than a C-30 for the same reason it holds more music.
None of this should read as a failing. As a way to give a 1984 toy a repeatable, shareable, voice-accompanied routine for a few dollars of mechanism, the record/replay scheme is elegant. But it is record/replay, not code, and the distinction is the entire point of this volume.
2.4 The clock, the timer, and the alarm
The second subsystem behind the chest panel is a built-in digital clock with a timer and an alarm, displayed on an LCD (theoldrobots.com; Wikipedia). Its specifications, again from the theoldrobots spec sheet, are those of a decent digital watch of the era:
Table 2 — watch of the era
| Clock/timer parameter | Value | Source |
|---|---|---|
| Display | LCD | theoldrobots |
| Accuracy | ±2 seconds per day | theoldrobots |
| Power | 1.5 V AA cell (rated ~5000 hours) | theoldrobots |
| Functions | Time, alarm, and a settable timer that can trigger playback | theoldrobots; Wikipedia |
Two details are worth dwelling on. First, the clock runs from its own small cell — a single 1.5 V AA, separate from the robot’s main 6 V drive battery (the full power picture is Vol. 6) — and that AA is rated for thousands of hours, so the clock keeps time even while the robot sits powered down on its charger (theoldrobots.com). The clock is, in effect, always awake. Second, the clock is the only thing on the Omnibot that can initiate action without a human present at the remote, and it does so in the most literal way: at a set time, the timer triggers the cassette deck to play a recorded routine (Wikipedia).
2.4.1 Clock-triggered routines — the “morning” trick
This is where the two subsystems combine into the Omnibot’s signature party piece. An owner records a routine — say, the robot rolling out of a corner, into the bedroom, with a recorded “good morning, time to get up” on the tape — and sets the alarm/timer for, say, 7:00 a.m. At the appointed time the clock starts the playback, and the Omnibot re-enacts the routine on its own: it rolls into the bedroom in the morning and announces the hour, with no one touching the remote (Wikipedia; theoldrobots.com).
It is a convincing trick, and it is the closest the Omnibot ever comes to looking autonomous. But the loop is exactly the open-loop one described above, with an alarm clock as the trigger. The robot is not deciding to wake anyone — it is playing a tape, started by a timer, of a route someone drove the night before. Move the robot a foot to the left before bed, or let the battery sag, and the morning performance drifts. The clock supplies the when; the cassette supplies the what; neither supplies any intelligence.
2.5 The “COMPUTER PROGRAMMING” panel
All of this is operated from the chest panel that the manual and the robot itself label “COMPUTER PROGRAMMING,” a row of controls grouped under headings for TIME, ALARM, MEMORY, and SET (theoldrobots.com; visible in the reference photo below). The panel is, functionally, the front of a digital clock-radio: TIME and ALARM set and read the clock; SET enters values; MEMORY governs the record/playback of routines to the cassette. There is no keyboard, no display of code, no numeric program entry — the “programming” the panel offers is the clock-and-cassette scheme described above, dressed in computer vocabulary for the toy market.

It is easy, looking at that silkscreen, to see how a 1984 buyer might have read “COMPUTER PROGRAMMING” as a promise of something it was not. The honest description is the one the mechanism supports: a clock you can set, a tape you can record, and a timer that can press “play.”
2.6 What it is not — the HERO Jr contrast
The sharpest way to fix what the Omnibot’s “brain” is, is to set it beside a machine
that had a real one. The Heathkit HERO Jr (RT-1) is the ideal foil: it shipped
the same year (1984), into the same living-room consumer market, at a comparable
toy-to-hobby price — and it was, underneath, a genuine computer. The HERO Jr carries
a Motorola 6808 microprocessor, a 32 KB behaviour ROM, and real programming
paths: one-touch personality keys for casual use, the HJPL robot-programming
language, and even cartridge BASIC over a serial link (_shared/comparison.md;
see the HERO Jr deep dive). When a HERO Jr executes a behaviour, a processor is
fetching and interpreting instructions and reading its sonar and light sensors to
decide what to do next.
The Omnibot has none of that. Laid out side by side:
Table 3 — The Omnibot has none of that. Laid out side by side
| Omnibot 5402 | HERO Jr (RT-1) | |
|---|---|---|
| Maker / year | Tomy, 1984 | Heathkit, 1984 |
| Class | Consumer toy | Consumer home robot |
| Processor | None documented | Motorola 6808 |
| Stored “program” | A cassette recording of remote commands | Code in a 32 KB ROM; HJPL / cartridge BASIC |
| How a routine runs | Tape replays the recorded command stream (open-loop) | CPU executes instructions, reads sensors, branches |
| Autonomy | None — replays what a human drove; clock can trigger it | Some — sensor-driven personality programs |
| Source | theoldrobots; Wikipedia | _shared/comparison.md; HERO Jr deep dive |
Both could “do something on their own” in a living room, but they did it in opposite
ways. The HERO Jr computed a behaviour from a program and its sensors; the Omnibot
replayed a performance from a tape. The HERO Jr’s “memory” is silicon you cannot
hold; the Omnibot’s is a cassette you can pop out and label. That is the toy-versus-
computer line this whole hub is drawn along, and the Omnibot sits firmly — and
unashamedly — on the toy side of it. The fuller cross-robot matrix, including the
HERO 1, HERO 2000, and the KIM-1 Loofbourrow build, is in _shared/comparison.md.
2.7 Limits, and what is left unclaimed
A few honest caveats close the volume:
- The electronics are not documented to component level. The consulted sources describe the deck and the clock by function and performance, not by part number. This volume therefore does not name the motor-driver, the record/playback electronics, or any IC behind the panel — and emphatically does not invent a “CPU.” If a future source (a board photo, a service sheet) names the parts, that detail belongs here then; until it does, the chip is left unclaimed.
- Capacity is set by tape, not bytes. Because the store is a cassette, the only meaningful “how much can it hold” answer is the length of tape — there is no byte count to quote, and the sources give none.
- “Programmable” is a marketing word here. Read in the toy-market sense the silkscreen intends, the Omnibot is “programmable.” Read in the computing sense the word usually carries, it is not. Both can be true at once; this volume keeps them separate so the machine is neither oversold nor sold short.
The next volume turns from the “brain” to the body: Vol. 3 covers the Omnibot’s wheeled, remote-steered drive — the mobility that a recorded routine actually commands.
Comments (0)