Omnibot 5402 · Volume 4
Arms, Claws & the Serving Tray
4.1 The trick the whole toy is built around
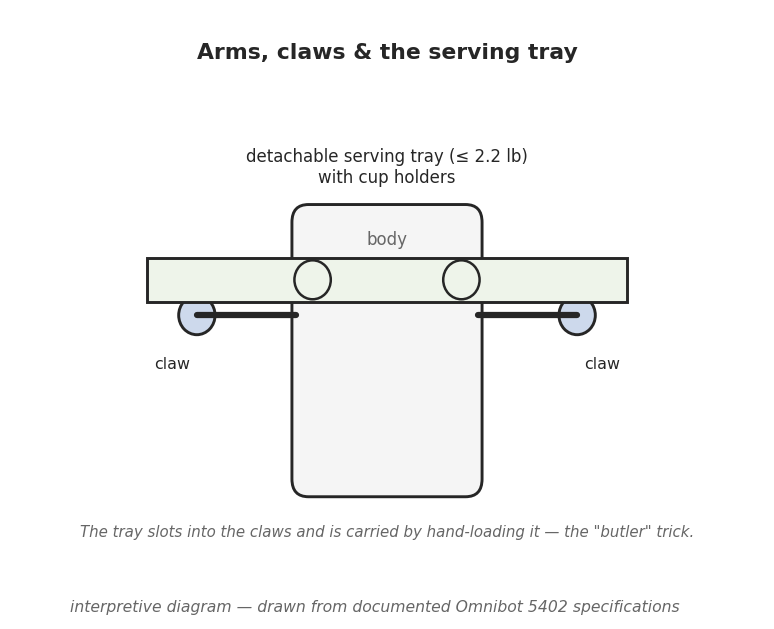
Of everything the Omnibot 5402 does, one image sold it: a knee-high robot gliding across a living-room carpet with a tray of drinks held out in front of it. That is the “robot butler” act, and it is the reason the arms exist. The arms end in a pair of claws, and the claws hold a detachable serving tray fitted with cup holders. Loaded with something light and steered across the room by remote, the Omnibot looks, for a moment, like a household servant (Wikipedia, “Omnibot”; theoldrobots.com).
It is worth being precise about what that act actually is, because the marketing image and the mechanism are not the same thing. The Omnibot does not pour a drink, does not pick a cup off a counter, and does not decide to bring anyone anything. A person loads the tray by hand, slots it into the robot’s claws, and then drives the robot to wherever it is going with the hand-held remote. The butler is real; the autonomy is not. This volume covers the arms, the claws, and the tray on the 5402 specifically, and it is careful throughout to keep the motorized arm-and-tray mechanism of the later Omnibot 2000 off the 5402, where it does not belong.
4.2 The arms and claws
The 5402 carries two arms, each ending in a claw — a simple gripping hand rather than a dexterous manipulator (Wikipedia; theoldrobots.com). On a hub that also documents the Heathkit HERO 1, with its five-axis arm and potentiometer feedback, it is tempting to read “arms with claws” as something comparable. It is not. The HERO 1’s arm is a programmable manipulator with documented joints and a gripper; the Omnibot’s arms are a holding fixture for the serving tray, in service of an appearance rather than a manipulation task.
The consulted sources describe the arms and claws by what they do — hold the tray — and not by their mechanism. So this volume holds the line on what is not documented:
- Claw / grip force is unclaimed. No figure for how hard the claws clamp, or what they could hold against gravity beyond the rated tray load, appears in the consulted record. None is asserted here.
- Arm degrees of freedom are unclaimed. Whether, and how far, the arms raise, lower, or swing is not given a documented joint count or range in the sources consulted. The arms are treated as the tray’s mount, nothing more.
- Reach is unclaimed. No documented figure for how far the arms extend from the body is asserted.
What the sources do support is the arms’ one defining job: to present and carry the detachable tray. That is the claim this volume makes, and it makes no claim past it.
4.3 The serving tray
The tray is the part that does the work of the illusion. The consulted spec sheet and the overview sources agree on its essentials (theoldrobots.com; Wikipedia):
- It is a detachable tray — a separate piece, not built into the body. It comes off, gets loaded, and goes back on.
- It carries cup holders, the recesses that keep a drink from sliding as the robot moves. These are visible in the reference photo below.
- It is rated to a maximum load of about 2.2 lb (roughly 1 kg) — the only documented number attached to the arm-and-tray subsystem, and the figure that bounds the whole “butler” act.
That 2.2 lb ceiling is the single most useful fact in this volume, because it quietly defines what the Omnibot can and cannot be asked to do. It is a light limit. Realistically it covers a drink or two, a snack, a TV remote, a note — small, light objects (theoldrobots.com). It does not cover a loaded dinner plate, a stack of books, or anything a person would think of as “heavy.” The serving trick works precisely because it is asked to carry only what a tray of drinks weighs.

4.4 How it actually works on the 5402
The mechanism, on the original 5402, is deliberately low-tech, and that is the point worth getting right.
The tray is hand-loaded. A person puts the drink, snack, or object onto the tray. The robot plays no part in loading itself; it has no way to pick an object up off a surface. The cup holders exist precisely so that the human can set a cup down and trust it to stay put (theoldrobots.com).
The tray slots into the claws. Once loaded, the tray is placed into — or onto — the robot’s claws, which hold it in front of the body. On the 5402 this is a manual, passive arrangement: the tray is slotted into the gripping hands, and the arms hold it as a fixture. The claws are the mount; the human is the loader.
The robot then carries it, steered by remote. With the tray held out front, the operator drives the Omnibot across the room using the hand-held TX remote — forward, back, left, right — exactly as covered in Vol. 3. The drive is wheeled and entirely teleoperated; the robot has no autonomy and no sense of where it is going beyond what the person at the remote tells it. The “butler” walking a drink to a guest is, mechanically, a remote-controlled car with a tray of drinks balanced on the front, narrated (if the owner likes) through the remote’s talk-through microphone (Vol. 5). The appeal is the theater of it; the substance is a hand-loaded tray on a teleoperated toy.
There is, importantly, no documented sensing tied to the tray — no weight sensor, no spill detection, no feedback that the tray is loaded or level. If a turn is taken too sharply and a cup tips, nothing in the robot knows or compensates. The 2.2 lb rating and a careful driver are the only things standing between the tray and the carpet.
4.5 What belongs to the Omnibot 2000, not the 5402
This is the one place the 5402 is most often over-described, so it gets its own section. The later, more capable Omnibot 2000 (model 5405) added a motorized tray-and-arm mechanism — an arm that the operator could command to raise and lower the tray under power, rather than relying on the passive, hand-slotted arrangement of the 5402 (Wikipedia; theoldrobots.com). That motorization is a 2000 feature.
On the 5402, the arm-and-tray subsystem is not motorized in that sense: the tray is hand-loaded and slotted into the claws, and the robot’s contribution is to carry it while being driven, not to raise, lower, or actuate it as a powered serving arm. The same caution applies to the two-gear high/low drive, which is likewise a 2000 upgrade and not a 5402 feature (see Vol. 3). When a description of “the Omnibot” mentions a motorized serving arm, it is describing the 2000. This volume keeps that feature off the 5402.
4.6 What it could realistically carry
Pulling the documented facts together gives a clear, honest picture of the serving function on the 5402:
Table 1 — serving function on the 5402
| Aspect | On the 5402 | Source |
|---|---|---|
| Arms | Two, ending in claws; mount/holder for the tray | Wikipedia; theoldrobots |
| Claws | Grip the tray; grip force not documented | theoldrobots (unclaimed force) |
| Tray | Detachable, with cup holders | theoldrobots; Wikipedia |
| Rated load | Maximum ~2.2 lb (~1 kg) | theoldrobots; Wikipedia |
| Loading | By hand; tray slotted into the claws | theoldrobots |
| Carrying | Robot drives the loaded tray across the room, remote-steered | Wikipedia; theoldrobots (cf. Vol. 3) |
| Motorized arm/tray | No — that is an Omnibot 2000 feature | Wikipedia; theoldrobots |
| Arm DOF / reach | Not documented — unclaimed | (unclaimed) |
Within that envelope, the realistic payload is exactly what the marketing showed: a drink in a cup holder, a light snack, a small household object — anything that fits the tray and stays under roughly 2.2 lb (theoldrobots.com). The Omnibot 5402 delivers the butler act convincingly at that scale, and only at that scale. It is a genuinely charming trick, and it is worth seeing it for what it is: a hand-loaded tray, slotted into a pair of claws, carried by a teleoperated toy that goes wherever the person holding the remote points it.
Comments (0)