Omnibot 5402 · Volume 6
Power, Acquisition & Restoration
6.1 What this volume covers
This volume takes the Omnibot 5402 from the wall socket to the collector’s shelf. It describes the power system that runs the robot — the sealed-lead-acid main battery, the small dry cells that keep the clock and the remote alive, and the home-base charger the machine shipped with — and then turns to the practical business of acquiring an Omnibot today: what a complete unit consists of, why completeness matters so much for a teleoperated toy, what the variant family looks like to a buyer, and which parts of a forty-year-old example are most likely to have failed. The electrical figures here are documented values from the consulted sources; everything to do with failure rates, market prices, and condition is kept deliberately qualitative, because the record does not support hard numbers on any of it.
Anyone intending to open up, charge, or rebuild a unit should read this volume
alongside the hub safety page, _shared/safety.md, which is cited at the relevant
points below. A sealed-lead-acid pack and a mains charger are the two genuinely
hazardous items on this otherwise mundane toy, and the safety page is the authority
for how to handle them.
6.2 The power system
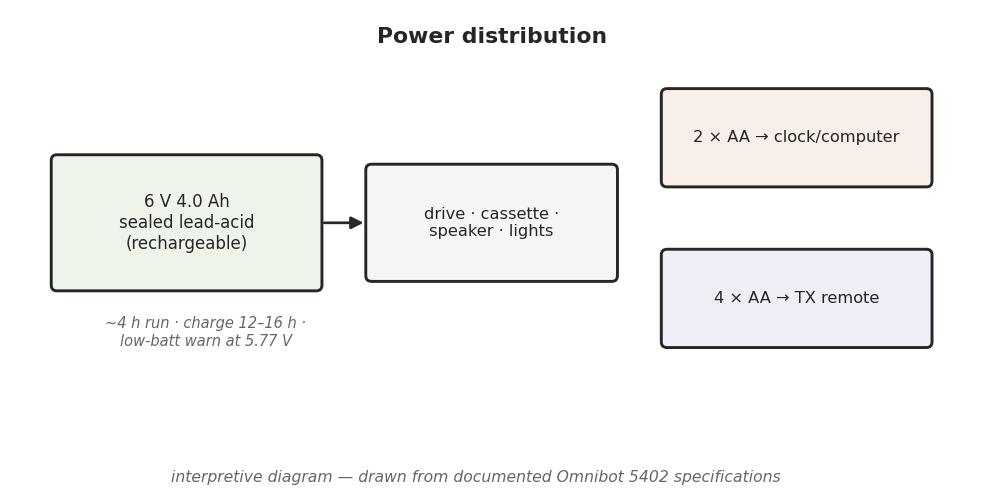
The Omnibot is powered from three separate sources, each doing a different job. The robot’s motors, lights, speaker, and cassette deck draw from a single main battery; the onboard clock and “computer” run from their own small cells so the time and any stored settings survive a main-battery swap; and the hand-held remote carries its own batteries entirely independent of the robot. Keeping these straight matters in restoration, because the failure modes and the replacement parts are different for each.
6.2.1 The main battery — a 6 V sealed-lead-acid pack
The heart of the power system is a 6 V, 4.0 Ah sealed-lead-acid (SLA) battery, a small rechargeable pack measured at roughly 2¼ × 1¾ × 4 inches (theoldrobots spec sheet). This is the cell that does the heavy lifting: it turns the drive wheels, lights the eyes, drives the speaker, and spins the cassette motor. An SLA pack was a sensible 1984 choice for a toy of this size — rechargeable, tolerant of rough handling, no spill-prone liquid electrolyte — and it is the same battery chemistry, scaled down, that the Heathkit HERO machines elsewhere in this hub carry in much larger packs.
The documented operating figures are modest but specific. A fully charged pack runs the robot for about four hours of continuous use, with the working voltage sitting near 5.5 V under load (theoldrobots spec sheet). As the charge depletes, the robot raises a low-battery warning at 5.77 V — a built-in cue that it is time to return the Omnibot to its charger rather than run the SLA pack flat, which is hard on lead-acid chemistry (theoldrobots spec sheet). Recharging is slow by modern standards: the documented charge time is 12 to 16 hours, consistent with the gentle constant-voltage trickle that an SLA cell of this size wants (theoldrobots spec sheet).
Two points are worth drawing out for a restorer. First, the four-hour runtime and the 5.77 V warning threshold are figures for a healthy pack; a decades-old original will hold a fraction of that, if it holds anything at all. Second, the long charge window is a property of the original charger and chemistry, not a target to be “improved” with a fast charger — overcharging or fast-charging a small SLA cell is a path to swelling, venting, and heat.
6.2.2 The clock and computer cells — 2×AA
Separate from the main pack, the Omnibot’s clock and “computer” run from 2×AA cells (collector sources). These keep the LCD clock, timer, alarm, and any stored settings alive independently of the main battery, which is exactly why an owner can swap or recharge the SLA pack without losing the time of day. The clock itself is a very low-drain load — Vol. 2 documents the LCD timekeeping at ±2 seconds per day off a single 1.5 V AA rated for thousands of hours — so these cells are not the part of the machine that wears out in use. In a long-stored unit, however, they are a prime suspect for leakage (see Aging and failure, below).
6.2.3 The remote’s cells — 4×AA
The hand-held TX remote is powered by its own 4×AA cells, wholly separate from the robot (collector sources; theoldrobots spec sheet). This is consistent with the remote being a self-contained radio transmitter — it has to work whether or not the robot is charged or even switched on. Because the remote is the robot’s lifeline (Vol. 5: without it the Omnibot is, in the record’s words, “virtually useless” beyond its clock and cassette functions), a remote with corroded battery contacts is as disabling as a dead robot. Vol. 5 covers the remote’s electronics and the three regional RF frequencies; here it matters only that it is a fourth thing to feed and a fourth battery compartment to inspect for corrosion.
6.2.4 The home base and charger
The Omnibot shipped with a home base that doubled as its charger, plus a demonstration cassette (theoldrobots spec sheet; collector sources). The home base is where the robot returned to replenish the SLA pack over its 12-to-16-hour charge cycle, and the demo cassette was the out-of-box showpiece — a pre-recorded routine that drove the robot through its repertoire to show a 1984 buyer what the machine could do without their having to record a sequence first.
For a restorer the charger is the single item that warrants the most caution,
because it is mains-powered. The hub safety page, _shared/safety.md, is explicit:
treat any opened mains-side wiring as live, unplug before working inside, verify with
a meter, and replace cracked line cords and failed strain reliefs. A forty-year-old
charger with a brittle cord or a perished strain relief should be made safe — or set
aside in favour of a known-good bench supply matched to the pack — before it is ever
plugged in.
6.3 Working on the battery and charger safely
Before any battery or charger work, consult _shared/safety.md. Two of its sections
apply directly to this machine and are summarized here only to point at it, not to
replace it.
The sealed-lead-acid pack. Per the safety page, old SLA cells can leak acid and can deliver very high short-circuit current — a dead short across the pack can weld tools and start fires. The practical rules it sets out are to fuse the pack, never short the terminals, dispose of leaking cells properly, and charge in a safe place: a non-flammable, ventilated surface, attended rather than left overnight unwatched. A 4.0 Ah cell is small, but lead-acid chemistry does not care about size when a spanner falls across both terminals. If a replacement pack is fitted, a modern 6 V SLA of the same capacity and similar dimensions is the like-for-like substitute; the safety page’s fusing guidance applies to the replacement just as it did to the original.
The mains charger. Per the safety page’s Electrical section, the home-base charger is the mains-side hazard on the machine: unplug before opening, assume opened wiring is live until metered, and replace cracked cords and failed strain reliefs. The safety page also flags aging filter capacitors in vintage supplies — inspect for bulging or leaking and reform or replace before applying full power. None of this is exotic, but it is the difference between a safe restoration and an avoidable one.
6.4 Acquiring an Omnibot today
6.4.1 Completeness is the whole game
For most vintage electronics, a bare working unit is the core of the value and the accessories are a bonus. The Omnibot inverts that, and the reason is the framing this whole series has carried: the Omnibot is a teleoperated record-and-replay toy, not an autonomous robot. Without its hand-held remote the robot cannot be driven, steered, spoken through, or have a routine recorded into it — the record describes a remote-less Omnibot as “virtually useless” beyond telling the time and playing a cassette (Wikipedia; see Vol. 5). A bare robot is therefore not a slightly-diminished Omnibot; it is a fraction of one.
This makes completeness the dominant factor in what a collector is acquiring. A unit that arrives with its remote, its serving tray, its home-base charger, and its demonstration cassette is a complete, demonstrable machine; one missing the remote is, functionally, an ornament. In rough order of how much each absence costs the buyer in usefulness:
- The remote (TX unit). The single most important accessory. Without it the robot cannot be operated at all in its intended mode (Vol. 5; Wikipedia). It must also match the robot’s regional RF frequency — the three documented options are 49.860 MHz (US), 27.145 MHz (Europe), and 40.680 MHz (TAL) (theoldrobots; Vol. 5) — so a remote from the wrong market will not pair with the robot.
- The serving tray. The signature “butler” prop (Vol. 4); a detachable part, easily separated from the robot over the decades and easily lost.
- The home-base charger. Needed to replenish the SLA pack; without it a buyer must source a suitable charger or bench supply (and observe the safety cautions above).
- The demonstration cassette. The least critical to function — any compatible cassette can be recorded onto — but a desirable original-completeness item.
Boxes, manuals, and the original tray cup-holders fall into the same “completeness raises desirability” pattern. The record does not support specific price figures for any configuration, and none are claimed here; the qualitative point is the durable one — a complete Omnibot with its remote is a substantially more desirable and more useful object than a bare robot.
6.4.2 The variant family a buyer encounters
A collector shopping for an “Omnibot” will meet a small family of related machines rather than a single model, and telling them apart matters because their features and completeness requirements differ (theoldrobots; Wikipedia; see Vol. 1):
- Omnibot 5402 — the original 1984 baseline, and the subject of this series.
- Omnibot MK II — the same machine under a “MK II” designation (also a 5402).
- 5402X “Goldbot” — a gold-finished edition of the 5402.
- Omnibot 2000 (model 5405) — the upgraded successor. It added a motorized tray and arm and a two-gear drive that the 5402 does not have, so a buyer comparing the two should not expect the original 5402 to motorize its tray (Vol. 3; Vol. 4).
- Omnibot Jr (“Charmmy”) — the smaller sibling, about 10.5 inches tall and fitted with ultrasonic navigation, a different class of machine from the 5402.
The practical upshot for acquisition: confirm which machine a listing actually shows, and confirm that the remote, charger, and any tray in the photographs belong to that machine and that region. A 2000’s motorized features and a Jr’s ultrasonic navigation are not properties of the 5402, and a remote on the wrong frequency will not drive the robot it is sold beside.
6.5 Aging and failure
The Omnibot is a forty-year-old consumer toy built largely of plastic and 1980s-grade electromechanics, and the things most likely to have failed are the ones that wear, leak, or perish with time rather than the solid-state electronics. The record does not support failure-rate figures, so the discussion below is qualitative — it describes which parts to suspect, not how often they fail.
6.5.1 The sealed-lead-acid pack — the usual casualty
The original SLA main battery is, by a wide margin, the part most likely to be dead.
Sealed-lead-acid cells self-discharge and sulphate over time, and a pack that has sat
uncharged for years — let alone decades — has almost always lost its ability to hold
a charge, and may have swollen or leaked. The safety page’s cautions about leaking
acid and short-circuit current apply with full force to an old pack
(_shared/safety.md). The standard restoration step is to replace it outright with a
modern 6 V SLA of the same 4.0 Ah capacity and similar dimensions, rather than to
attempt to revive an exhausted original; a fresh pack also restores the documented
runtime and the meaningful 5.77 V low-battery behaviour that an exhausted cell cannot
produce.
6.5.2 The cassette deck — belts and mechanism
The chest cassette deck (Vol. 2) is the other classic vintage failure point. Cassette transports of this era rely on rubber drive belts and idler tyres that perish, stretch, and go gummy with age, and on a mechanism that can stiffen with old grease. A deck that will not spin, runs at the wrong speed, or fails to maintain the documented ±3% speed and sub-0.3% wow-and-flutter (Vol. 2) is very often a belt problem rather than a dead motor. Because the deck is central to the machine’s record-and-replay “programming,” a non-functioning transport disables the headline trick even on an otherwise-working robot — so the belts are a prime target for a restorer, and replacement belt kits for common transports of the period are the usual fix.
6.5.3 The remote — corrosion and the lifeline problem
The remote deserves its own mention not because it is especially fragile but because of how much rides on it. Its 4×AA compartment is a prime site for alkaline-cell leakage and contact corrosion if cells were left in it for years, and corroded contacts can disable the transmitter as effectively as a cracked board. Given that the robot is “virtually useless” without a working remote (Vol. 5; Wikipedia), a buyer evaluating a unit should treat the remote’s condition — and the state of its battery contacts — as seriously as the robot’s.
6.5.4 Dry cells and contacts elsewhere
The same leakage concern applies to the robot’s own 2×AA clock/computer cells: a
unit stored with cells left in place may show corrosion in that compartment, which
can creep into the clock circuit. The general restoration hygiene from the safety
page applies throughout — remove suspect cells, clean corrosion with the appropriate
neutralizer, photograph and label before disassembly, and test cleaners on a hidden
spot of the fragile vintage plastic first (_shared/safety.md).

6.6 Where this leaves a prospective owner
The Omnibot 5402 is a straightforward machine to assess once its priorities are
understood. Electrically it is simple: one 6 V 4.0 Ah SLA pack doing the work, two
small clock cells holding the time, and a self-powered remote — with the SLA pack and
the mains charger being the only two items that warrant real care, both covered by
_shared/safety.md. As a collectible it is unusual in how heavily its value rides on
completeness, a direct consequence of its being a teleoperated toy: a unit with its
remote, tray, charger, and demo cassette is a complete machine, while a bare robot is
a fraction of one. And as a forty-year-old toy its likely faults are the predictable
ones — a dead SLA battery first, perished cassette belts second, and dry-cell
corrosion in the remote and clock compartments — all of them repairable, none of them
documented here with invented numbers. With a fresh battery, a safe charger, a working
remote, and a re-belted deck, the machine does again what it did in 1984: roll across
a living-room floor on command, carry a tray, and replay a routine recorded to tape.
The cheatsheet in Vol. 7 distils the power figures, the variant family, and the acquisition checklist into a single quick-reference page.
Comments (0)