Heathkit HERO 1 (ET-18) · Volume 9
Cheatsheet — HERO 1 Quick Reference
A dense, single-page reference distilled from Vols. 1–8. Every hard row carries the
source it traces to; nothing new is claimed here that is not established earlier in
the series. Where the secondary record is uncertain, the row says so. The
authoritative primary for exhaustive detail (the full memory map and schematics) is
the ET-18 manual set on the Internet Archive
(archive.org/details/heathkit-hero-1-ET-18).
9.1 At a glance
Table 1 — At a glance
| Attribute | Value | Source |
|---|---|---|
| Name | HERO 1 — Heathkit Educational RObot | HERO FAQ; Wikipedia |
| Models | ET-18 (assembled), ETW-18 (kit) | HERO FAQ |
| Project start / launch | October 1979 / 1982 | Wikipedia; historyofinformation |
| Price | $1,500 kit / $2,500 assembled | Wikipedia |
| Units sold | ~14,000 over ~8 years | Wikipedia |
| Line supported until | 1995 | Wikipedia |
| Dimensions | 20” high × 18” diameter | HERO FAQ; theoldrobots |
| Weight | ~39 lb with accessories | HERO FAQ; theoldrobots |
| Market | Education + entertainment | Wikipedia |
9.2 CPU & memory
Table 2 — CPU & memory
| Item | Value | Source |
|---|---|---|
| CPU | Motorola 6808, 8-bit, 1 MHz | Wikipedia; HERO FAQ; makezine |
| RAM | 4 KB — two 6116 static-RAM chips | HERO FAQ |
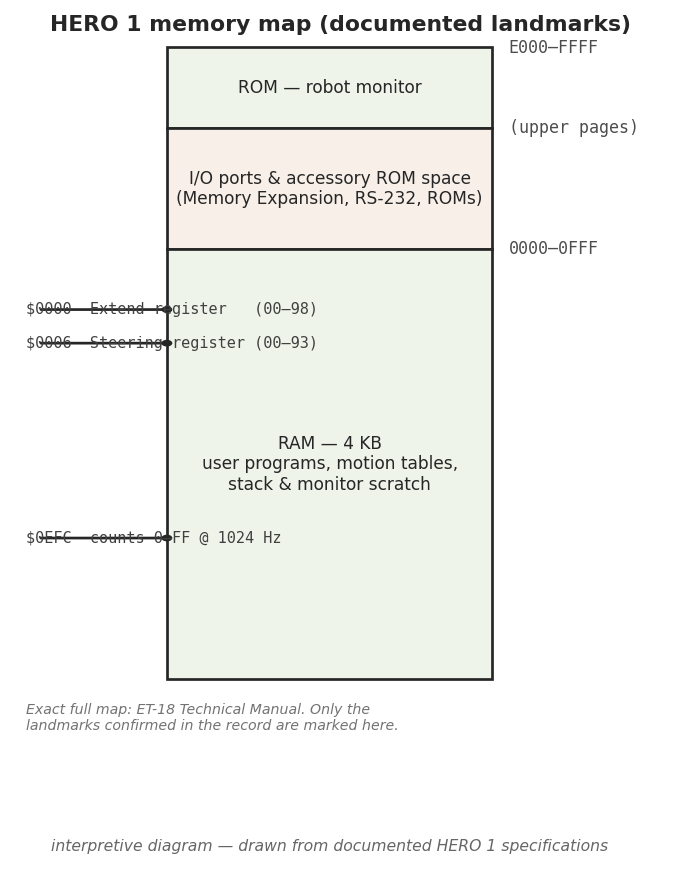
| ROM | Robot monitor; reported as 2 KB, ROM space E000–FFFF | Wikipedia; HERO FAQ |
| I/O | Memory-mapped ports to motors, sensors, speech | HERO FAQ |
Documented monitor landmarks (the rest of the map lives in the ET-18 Technical Manual; not reconstructed here):
Table 3 — Manual; not reconstructed here)
| Address | Role | Source |
|---|---|---|
$0000 | ”Extend” register (range 00–98) | HERO FAQ |
$0006 | ”Steering” register (range 00–93) | HERO FAQ |
$0EFC | Counter, 0–FF @ 1024 Hz | HERO FAQ |
9.3 Drive & steering
Table 4 — Drive & steering
| Item | Value | Source |
|---|---|---|
| Wheels | Three — two fixed rear, one steerable front drive | HERO FAQ |
| Propulsion + steering | DC motors at the front wheel | HERO FAQ; theoldrobots |
| Stepper motors | Seven “control all movements” (DC drive is separate) | HERO FAQ |
| Stepper allocation | Head + steering + the five arm axes — interpretive; not itemized in the record | (interpretive, see Vol. 3) |
| Head rotation | 350° | HERO FAQ; Wikipedia; theoldrobots |
| Power | Four gel-cell batteries; 120/240 VAC, 50/60 Hz charger | HERO FAQ; theoldrobots |
9.4 Arm (optional, ET-18-1)
Table 5 — Arm (optional, ET-18-1)
| Item | Value | Source |
|---|---|---|
| Axes | 5 axes + gripper | HERO FAQ |
| Lift | ≈16 oz (1 lb) maximum | HERO FAQ |
| Drive | Stepper-driven joints, potentiometer position feedback | HERO FAQ |
| Joint naming | shoulder / extension / wrist pivot / wrist rotate / gripper — interpretive reading | (interpretive, see Vol. 4) |
9.5 Sensors
Table 6 — Sensors
| Sensor | Documented range / spec | Source |
|---|---|---|
| Sonar (ultrasonic ranging) | 4 inches – 8 feet | Wikipedia; HERO FAQ |
| Light | Visible spectrum into the infrared | Wikipedia; HERO FAQ |
| Sound | 200 – 5000 Hz | Wikipedia; HERO FAQ |
| Motion | Up to 15 feet | Wikipedia; HERO FAQ |
| Also | Limit switches, real-time clock, experimental breadboard | theoldrobots |
9.6 Speech (optional, ET-18-2)
Table 7 — Speech (optional, ET-18-2)
| Item | Value | Source |
|---|---|---|
| Synthesizer | Votrax SC-01 phoneme speech chip | Wikipedia; HERO FAQ |
| Method | Phoneme-code stream → continuous formant speech | Votrax SC-01 documentation |
| Kit option price | ≈$149.95 | Wikipedia |
9.7 Control & programming
Table 8 — Control & programming
| Route | Notes | Source |
|---|---|---|
| Hex keypad + 6-digit LED | On the head; enter/verify/modify 6808 machine code, select modes | Wikipedia; HERO FAQ |
| Teaching pendant | Manual control; record / play motions | HERO FAQ |
| RF remote | Optional transmitter, two frequency models (ET-18-3) | HERO FAQ |
| RS-232 host link | Via Memory Expansion board (ET-18-6) | HERO FAQ |
| Default language | 6808 machine code | HERO FAQ |
| BASIC | HERO-1 BASIC (ET-18-9), requires memory expansion | HERO FAQ |
9.8 Accessory & ROM part numbers
Table 9 — Accessory & ROM part numbers
| Part # | Accessory / ROM | Source |
|---|---|---|
| ET-18-1 | Robot arm (5 axis) | HERO FAQ; ET-18 manual set |
| ET-18-2 | Speech (Votrax SC-01) | HERO FAQ; ET-18 manual set |
| ET-18-3 | Remote operation (RF) | ET-18 manual set |
| ET-18-4 | Utility / Demo ROM | HERO FAQ; ET-18 manual set |
| ET-18-6 | Memory expansion board (+ RS-232) | HERO FAQ; ET-18 manual set |
| ET-18-7 | Automatic Mode ROM | ET-18 manual set |
| ET-18-9 | HERO-1 BASIC ROM (needs ET-18-6) | HERO FAQ; ET-18 manual set |
9.9 The HERO line, in one row each
Table 10 — The HERO line, in one row each
| Model | Distinguishing spec | Source |
|---|---|---|
| HERO 1 (ET-18) | 6808 @ 1 MHz, 4 KB RAM, optional arm + speech | Wikipedia; HERO FAQ |
| HERO Jr | Smaller home version, 2 KB RAM | Wikipedia |
| HERO 2000 | Intel 8088 main CPU, multi-processor, RAM to 576 KB | Wikipedia |
Sources
- ET-18 manual set — factory manuals, Internet Archive
(
archive.org/details/heathkit-hero-1-ET-18): Assembly, Technical, Arm (ET-18-1), Voice (ET-18-2), Remote Operation (ET-18-3), BASIC (ET-18-9), the ROM and Memory Expansion accessory manuals, and the schematic sheets. Authoritative primary. - HERO FAQ —
hero.dsavage.net(deepest technical secondary; the monitor memory landmarks). - Wikipedia — “HERO (robot)”.
- theoldrobots.com, historyofinformation.com, makezine.com, robotsandcomputers.com, vintagecomputer.ca — supporting secondaries.
- Votrax SC-01 documentation — general phoneme-synthesizer facts in Vol. 6.
See _shared/comparison.md for the cross-robot matrix and _shared/safety.md for
the battery and mains-charger cautions referenced in Vol. 8.
Comments (0)