Loofbourrow · Volume 1
Overview — Mike, the KIM-1 Robot of Tod Loofbourrow
1.1 What it is
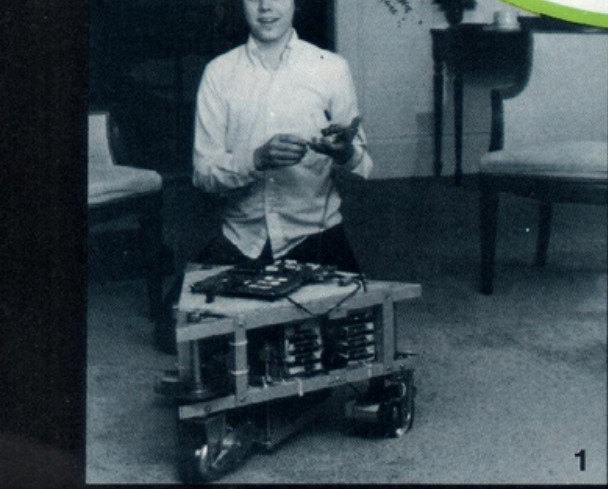
“Mike” — given the full name Microtron by its builder — is a three-wheeled, KIM-1-controlled mobile robot constructed by then-teenager Tod Loofbourrow during the mid-1970s. Loofbourrow documented Stage I of the build in the April 1977 issue of Interface Age (“A Computer Controlled Robot,” Vol. 2, No. 5) and later expanded the documentation into the Hayden book How to Build a Computer-Controlled Robot (1978). By 1996 the robot stood roughly six feet tall and weighed roughly seventy pounds (Inc., 1996, via cyberneticzoo), though the Interface Age article and the Hayden book document the rolling base and its control electronics; the construction of the tall upper body is not covered in those sources and remains unclaimed throughout this deep dive.

The two names for the robot — “Mike” (the short form appearing on the Interface Age cover in quotation marks) and “Microtron” (used consistently in the article body itself) — appear across primary and secondary sources. Cyberneticzoo lists both; the Interface Age cover employs “Mike” as the working label while the article text uses “Microtron.” The Interface Age article opens with Loofbourrow’s own description: “The object in question is Microtron, a triangular shaped robot that I built last summer when I was fourteen” (Interface Age, Apr. 1977).
The builder’s byline in the Interface Age article reads: “by Tod Loofbourrow / Member of the Amateur Computer Group of New Jersey” (Interface Age, Apr. 1977). The amateur-club context is significant: the Amateur Computer Group of New Jersey represented exactly the hobbyist infrastructure that made KIM-1 experimentation practical in the mid-1970s.
1.2 Headline facts
Table 1 — Headline facts
| Attribute | Value | Source |
|---|---|---|
| Builder | Tod Loofbourrow | Interface Age, Apr. 1977 |
| Club affiliation | Amateur Computer Group of New Jersey | Interface Age, Apr. 1977 |
| Age at Stage I build | 14 (self-reported: “when I was fourteen”) | Interface Age, Apr. 1977 |
| Build span | 1975–76 | Bagnall, “Tim and Kim” chapter title |
| Names | ”Mike” (short) / “Microtron” (full) | Interface Age cover; article text; cyberneticzoo |
| Primary documentation | Interface Age, Apr. 1977 (11 pp.); How to Build a Computer-Controlled Robot, Hayden, 1978 | — |
| Final height / weight | ~6 ft / ~70 lb | Inc., 1996, via cyberneticzoo |
| Brain | KIM-1, MOS 6502 @ 1 MHz, 1 KB RAM | Interface Age, Apr. 1977; Bagnall, “Tim and Kim” |
| Frame (Stage I) | Triangular, ⅛″×1″ angle aluminum, ~23″ sides, ~15″ height | Interface Age, Apr. 1977 |
| Frame (Stage II) | Octagonal, ~27″ wide, ~14″ high | cyberneticzoo |
| Drive | Three motorized wheels, one steerable; five forward / five reverse speeds | Interface Age, Apr. 1977; cyberneticzoo |
| Steering range | 0°–60° | cyberneticzoo |
| Power | 12 V car battery | Interface Age, Apr. 1977; cyberneticzoo |
| Book print run (approx.) | ~20,000 copies | daughterofkrypton |
Age note. The Bagnall “Tim and Kim” chapter describes Loofbourrow as a “gifted 12-year-old hacker” (Bagnall, On the Edge). This conflicts with the primary source: the Interface Age article, authored by Loofbourrow himself, states he was fourteen at the time of the Stage I build. The primary-source account is taken as authoritative throughout this deep dive.
1.3 The staged build
The robot evolved through three documented stages, each expanding its capability (cyberneticzoo). The sources document the rolling base across all stages; the tall humanoid upper body is visible on the Interface Age cover but its construction is not described in the available primary or secondary documentation.
1.3.1 Stage I — Joystick control
Stage I produced the triangular rolling chassis documented in the Interface Age article. The frame is fabricated from ⅛″×1″ angle aluminum in a triangular arrangement measuring approximately 23″ per side (Interface Age, Apr. 1977; cyberneticzoo). The height of the Stage I base is reported as approximately 15″ in the Interface Age article and approximately 14″ by cyberneticzoo; the discrepancy is unresolved and both figures are recorded here. Three motorized wheels support the chassis, with one wheel independently steerable via a dedicated steering motor. A plywood board bolted to the aluminum frame carries the KIM-1 single-board computer; a 12 V car battery provides power (Interface Age, Apr. 1977; cyberneticzoo).
At Stage I, the operator directed the robot via joystick: input from a handheld joystick entered the KIM-1 port-A (PA) pins through an op-amp comparator front-end, and 6502 assembly routines executed speed-control and steering from the Interface Age listing. There was no autonomous sensing at this stage. (The full drive, steering, and software architecture is documented in Vols. 4, 5, and 7.)
1.3.2 Stage II — Autonomous obstacle avoidance
Stage II replaced the triangular frame with an octagonal body, approximately 27″ wide and approximately 14″ high (cyberneticzoo). The enlarged frame accommodated a suite of sensors: an ultrasonic transducer with an effective range of roughly 1 inch to over 10 feet, eight impact ribbon switches distributed around the perimeter, and rubber feelers (cyberneticzoo). With these inputs, the robot could navigate and avoid obstacles without continuous operator input. (Sensing is covered in detail in Vol. 6.)
1.3.3 Stage III — Voice recognition
Stage III added a microphone and associated circuitry, giving the robot the ability to respond to approximately ten spoken commands (cyberneticzoo). Stage III thus closed the loop from joystick-only manual control (Stage I) through autonomous obstacle-avoidance (Stage II) to a mixed-initiative, voice-commanded system (Stage III). The internal architecture of the Stage III voice-recognition subsystem is not documented in the available sources and is not claimed here.
The tall body. The Interface Age article and the Hayden book document the rolling base — the aluminum chassis, the wheels, the KIM-1 mount, the drive and sensing electronics. The tall humanoid upper body visible on the Interface Age cover, and reported as roughly six feet in height by Inc. in 1996 (via cyberneticzoo), is not described in those sources. Its construction, date of addition, and structural details remain explicitly unclaimed throughout this series. Similarly, the exact dates of each stage transition are not documented in the available sources and are not asserted here.
1.4 Where it sat
The Loofbourrow robot stood at the intersection of two forces that defined the mid-1970s hobbyist moment: the affordable single-board microcomputer and the nascent amateur-robotics movement. The KIM-1 was released in mid-1975 at $245 fully assembled — a remarkable price for a complete, documented 6502-based system (Bagnall, “Tim and Kim”) — and it rapidly became a platform of choice for experimenters who wanted a real microprocessor without building one from scratch. Embedding a KIM-1 in a mobile robot required discipline: 1 KB of RAM, a hex keypad, a six-digit LED display, and hand-entered assembly code left almost no margin. The Interface Age article contains the complete 6502 listings Loofbourrow used; Kilobaud magazine noted that MOS Technology had sold over 7,000 KIM-1 units by June 1977 (Bagnall, “Tim and Kim”), so there was an audience ready to follow the same approach.
The April 1977 Interface Age documentation — eleven pages of article text, circuit diagrams, and assembly listings — was written by Loofbourrow himself. Hayden Publishing approached him to expand the material into a book; the manuscript was written on yellow notepad paper and typed by his mother (Bagnall, “Tim and Kim”). How to Build a Computer-Controlled Robot appeared in 1978 and reached approximately 20,000 copies (daughterofkrypton). A footnote in Bagnall’s account records that Loofbourrow later applied the book’s revenues to founding a company called Foundation Technologies (Bagnall, “Tim and Kim,” fn. 3).
The volumes that follow examine each technical layer of the documented rolling chassis: Vol. 2 covers the KIM-1 brain and its 6502 architecture; Vol. 3 the chassis and frame geometry; Vols. 4 and 5 the drive train, motor control, and analog front-end; Vol. 6 sensing and Stage II/III autonomy; Vol. 7 the assembly listings and programming model; Vol. 8 the robot’s legacy and Loofbourrow’s later career.
Comments (0)